1. PID Control
2. The purpose of this lab was to assemble a PID controller
using arduino and apply the controller to a led and photoresistor to
limit the power or increase the power through the photoresistor to
maintain a set point.
3. Materials and Methods
Arduino computer
Application
Paper and Pencil
Robot Car
4. Results
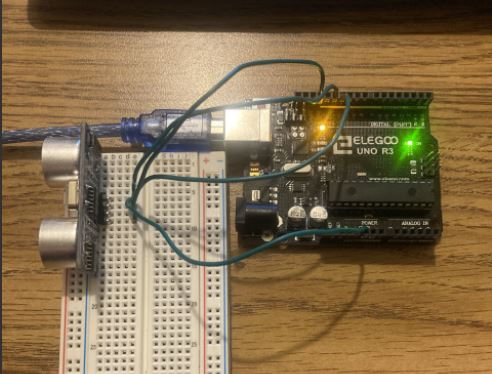
Figure 1. Sensor verification of the SR04 Ultrasonic sensor.
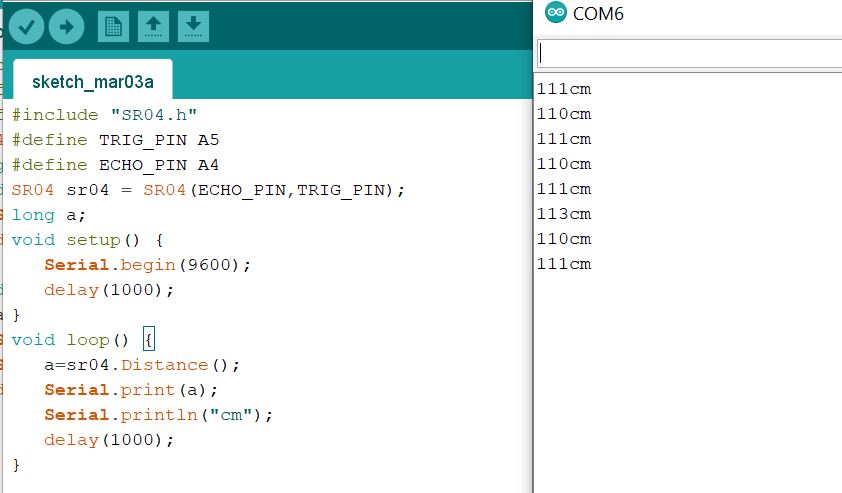
Figure 2. Verfication of the distances obtained from sensor.
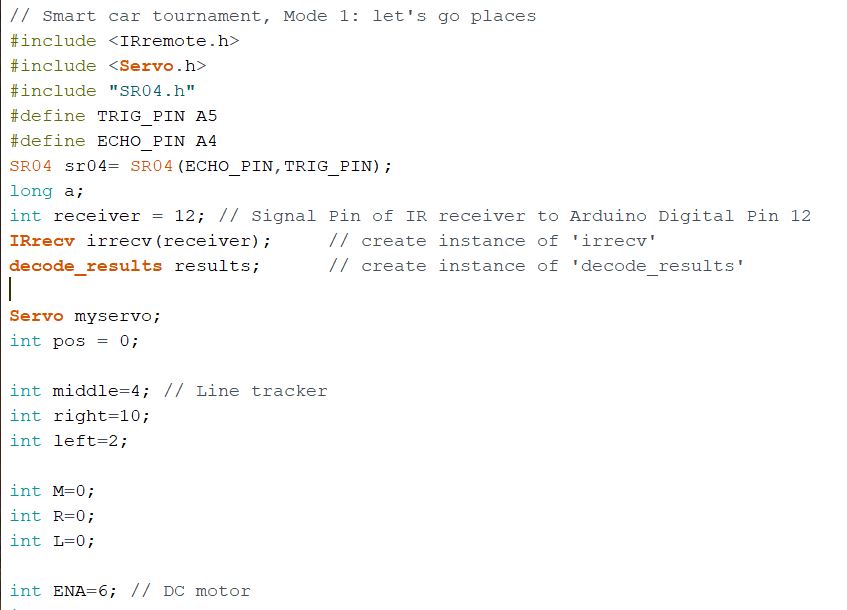
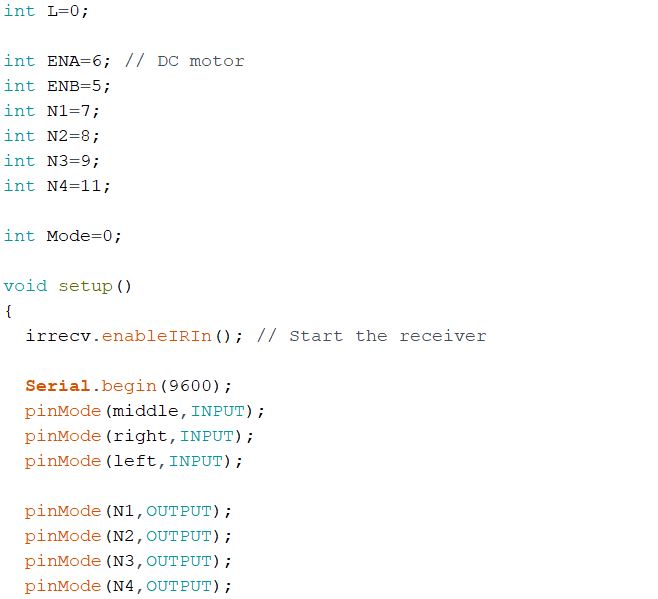
Figure 3. Verification of tasks 2-8 including sensor verification, user control, line follower, and obstacle avoider.
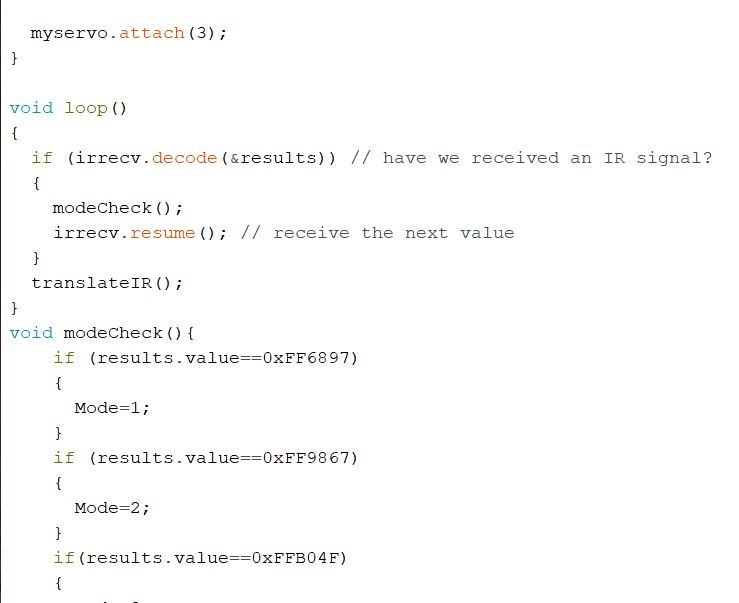
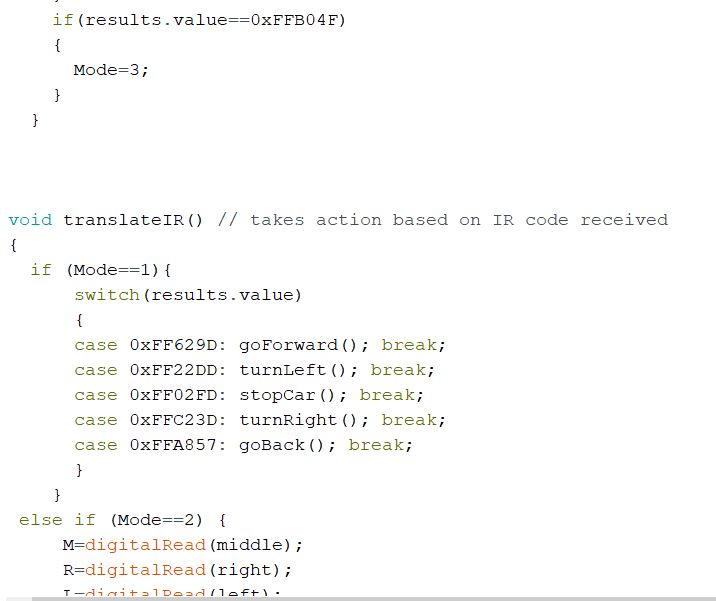
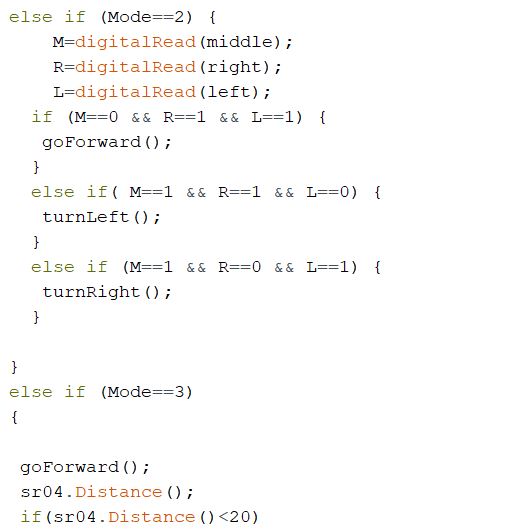
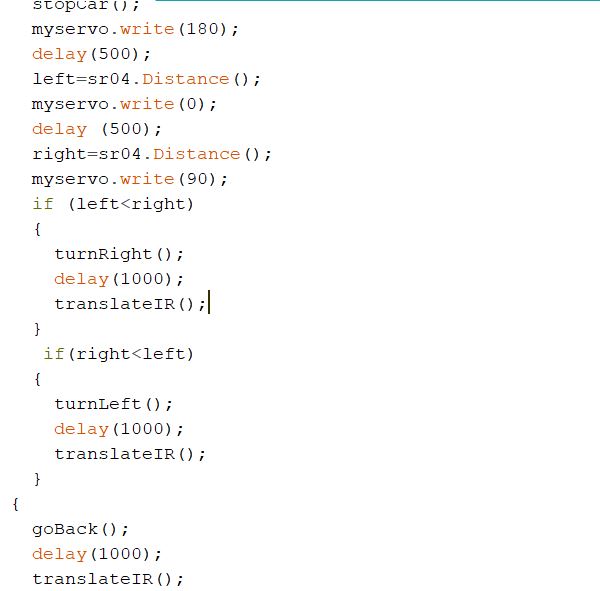
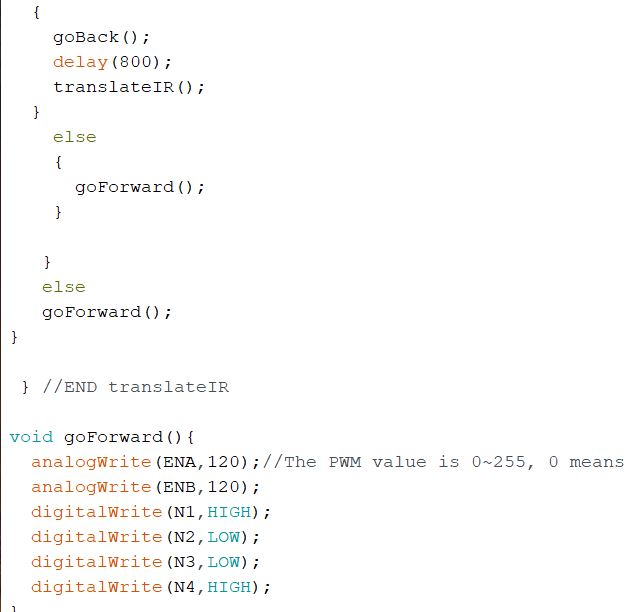
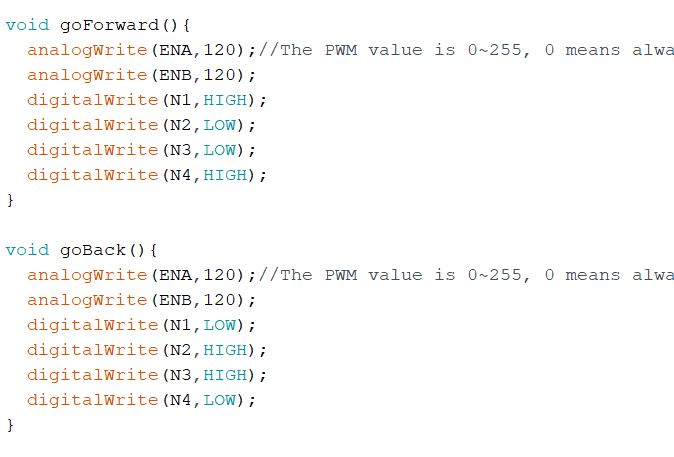
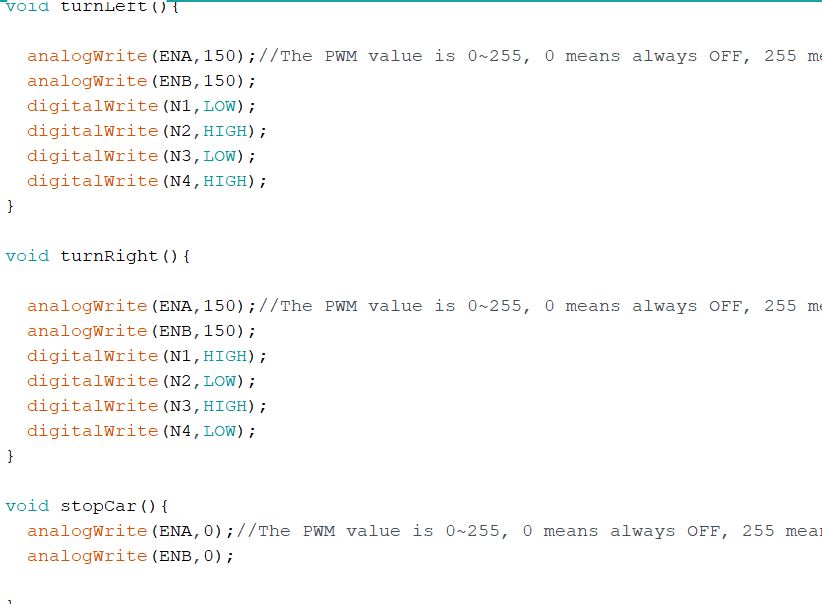
Figure 4. Code that provided user control, line follower, and obstacle avoider. 5.
Discussion
The lab was useful for reinforcing the coding language used for
Arduino. The c based code was challeging when implementing the line
tracker and obstacle avoider but once relized helped to clarify the
objectives shown in the code. Especailly the obstacle avoider code
being more complex helped to further understand the code and variables
used to govern sensors and the motors of the robot car.