CE432 2020 Fall
Tutorial 3
John Hitti
jdhitti@fortlewis.edu
Tutorial 3 - Video Sreaming Web Server and Robot Car
Introduction In this tutorial
we will be using the ESP32-CAM to stream a video feed on a webserver.
This will then be used later in the tutorial when we join the ESP32-CAM
with a robot car, using the ESP32-CAM to steer the car from a webserver
with real time video feedback.
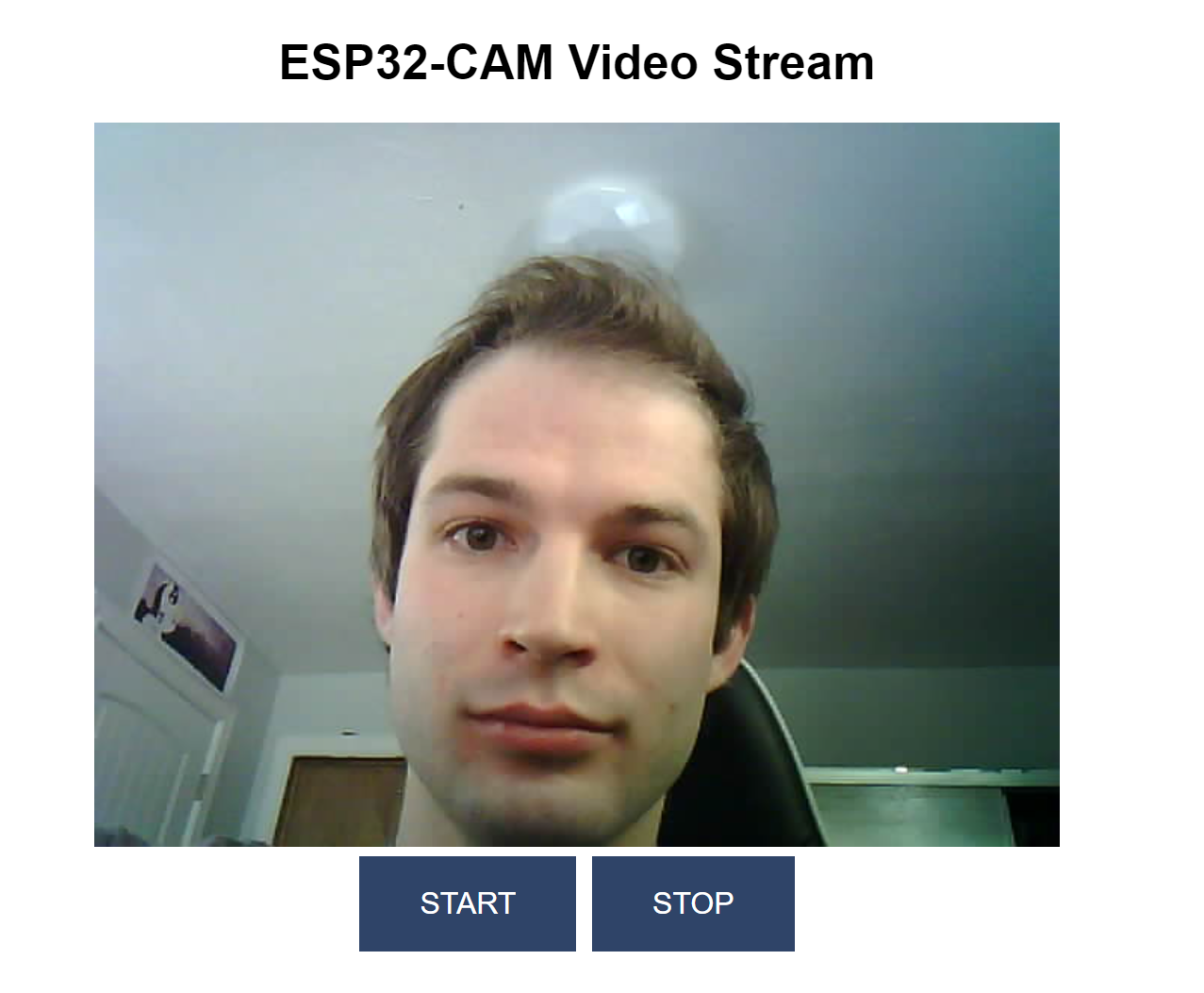
Task 1. Start and stop video streaming on a web server.
In this task we will use the ESP32 stream a video feed via a webserver. Using the example code we can use the camera on the ESP32 to capture and send video data.
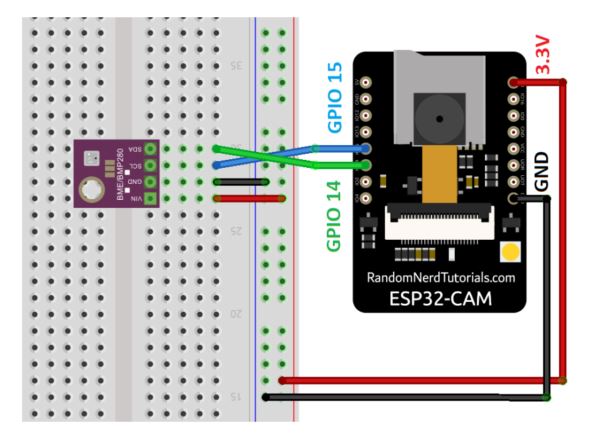
Task 2. Video Streaming with sensor readings
In this
task we will take the previous task further by adding readings from a
BMP180 sensor to our streamed video feed. To connect the sensor, we
will use the hardware connections as described in the below figure.
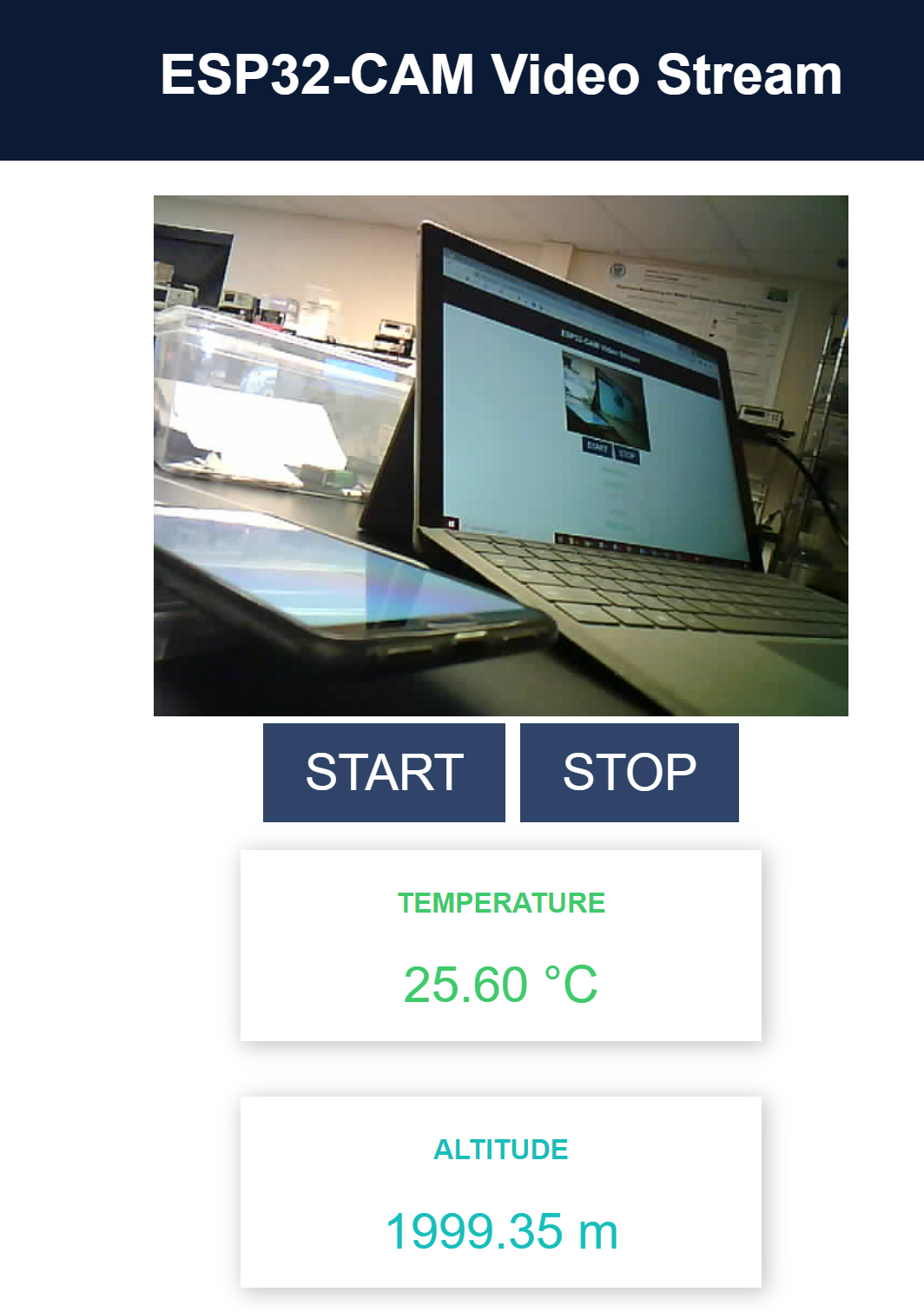
Once the connections have been made we can use our edited example code
to stream a video feed with sensor readings. The original example code
used the BPM280 and NOT the BMP180. This can be accounted for by
editing the code to accept the different board. The connections are
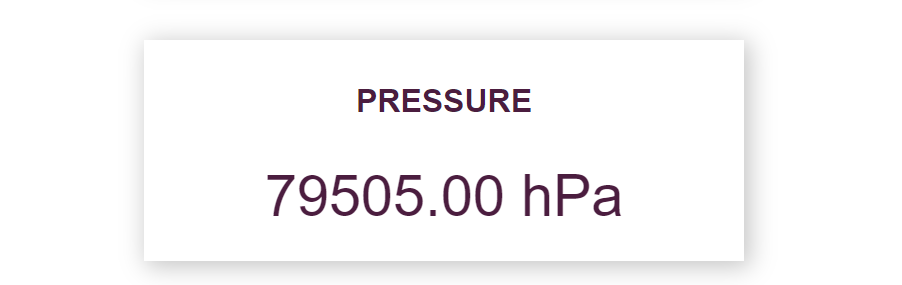
still the same. Once the code is running, we can see that the board
also displays temperature, altitude, and pressure readings alongside
the video stream.
Task 3. Remote controlled car robot with a camera
In this
task we are building on our streamed video feed by allowing the ESP32
to control a car. The ESP32 will interface with a motor driver attached
to a car and allow us to control it while viewing a video feed. We will
build our car by following the guide here:
https://www.youtube.com/watch?v=dZjbGpynQJA
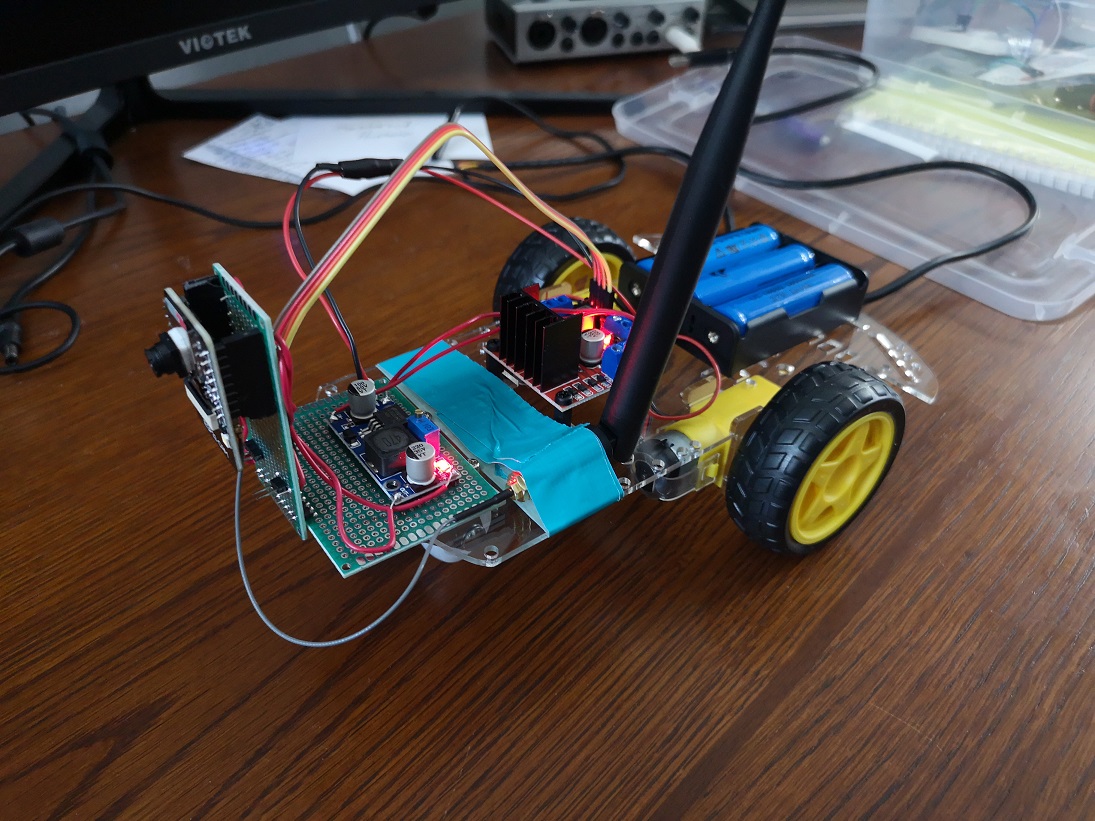
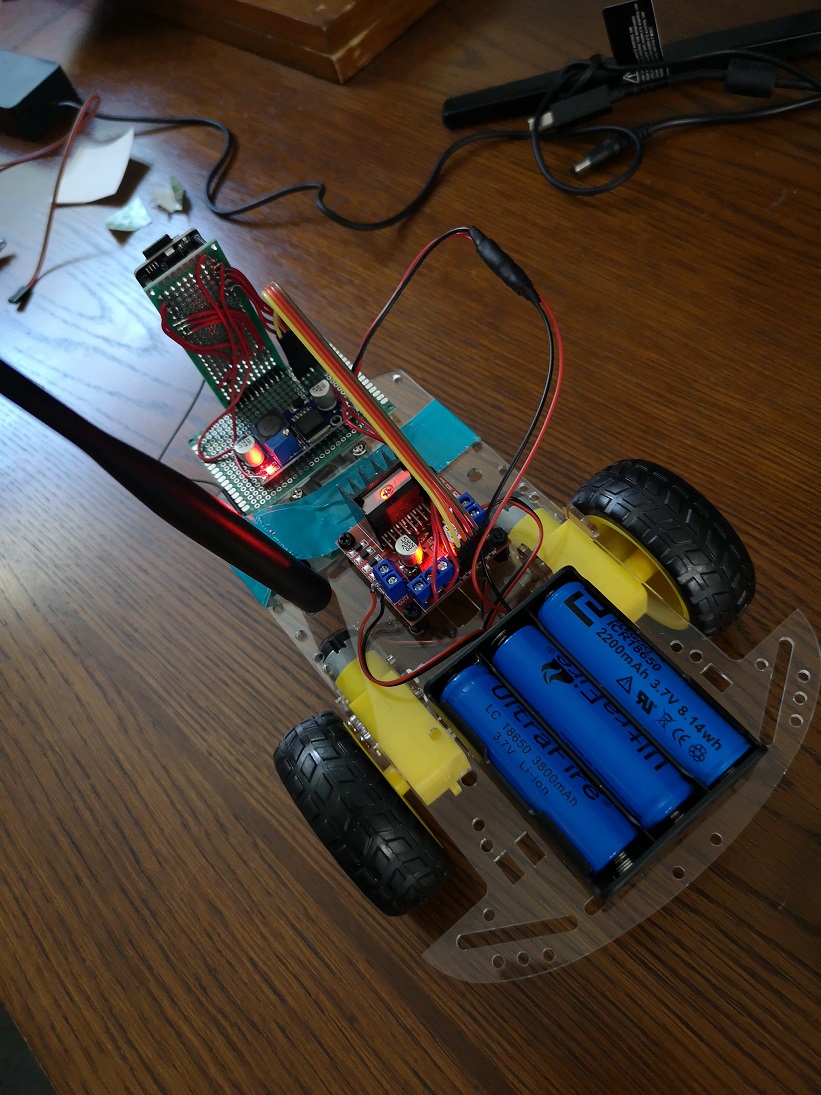
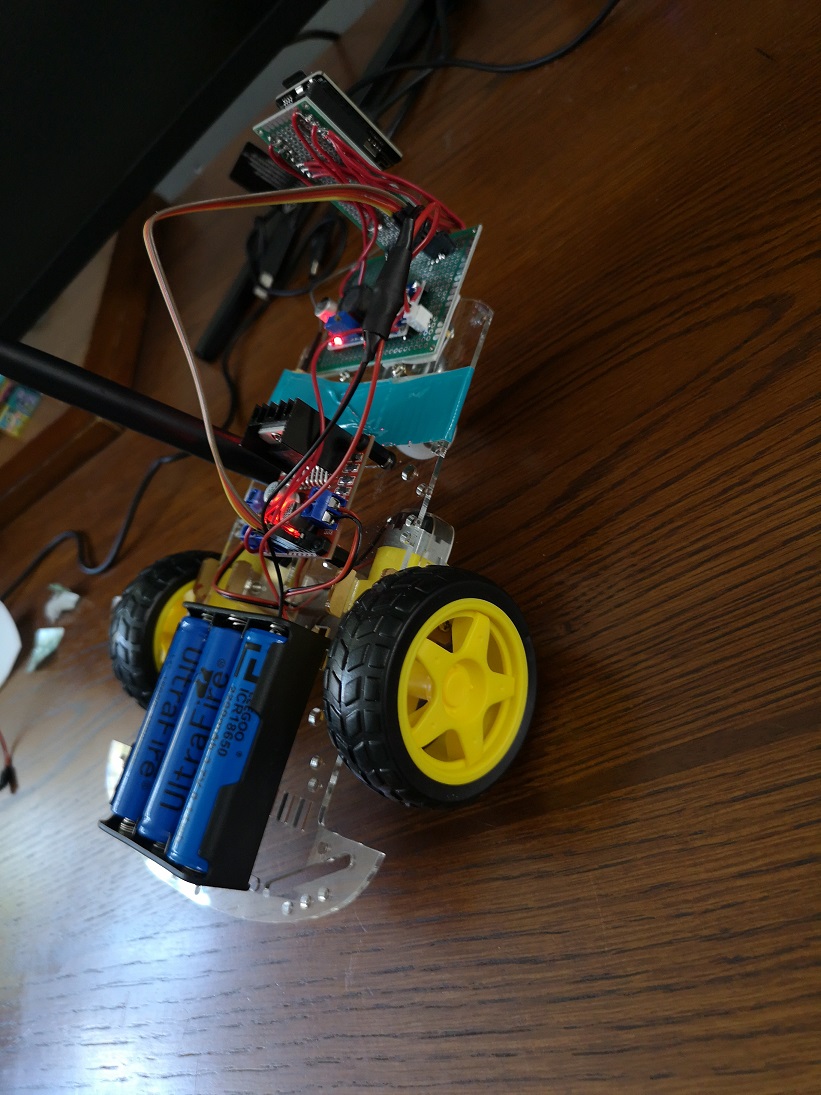
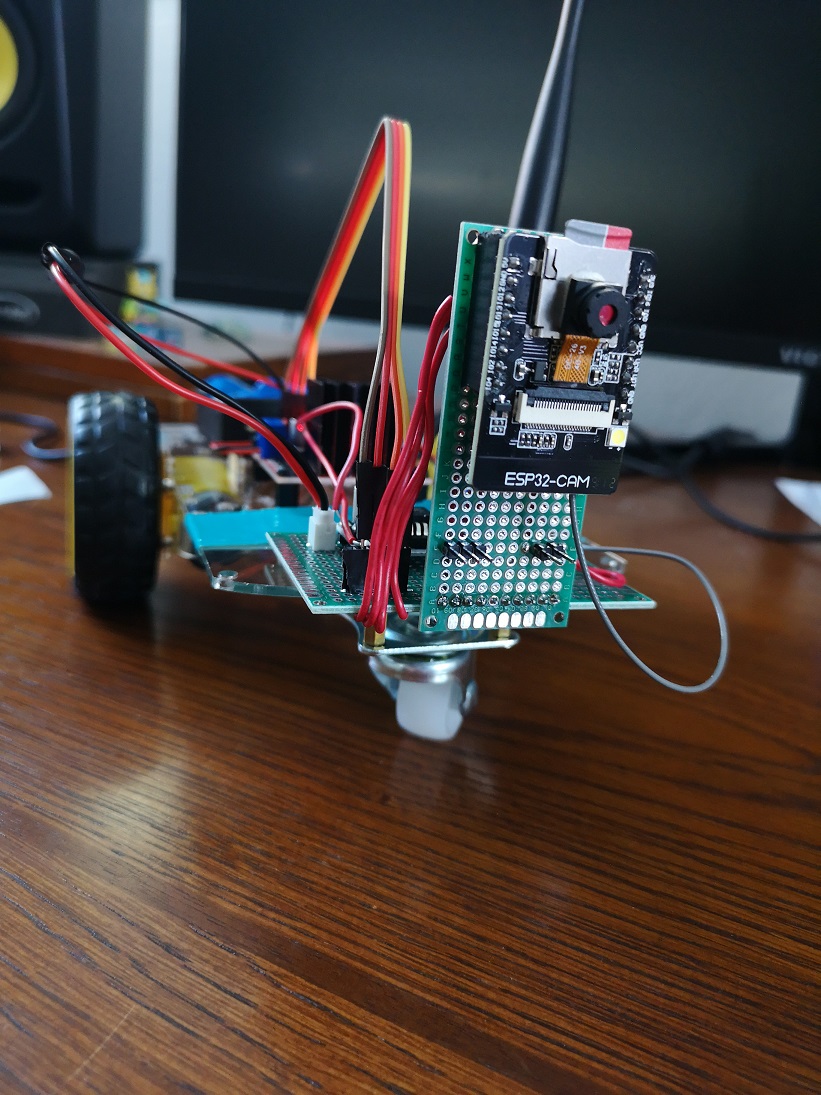
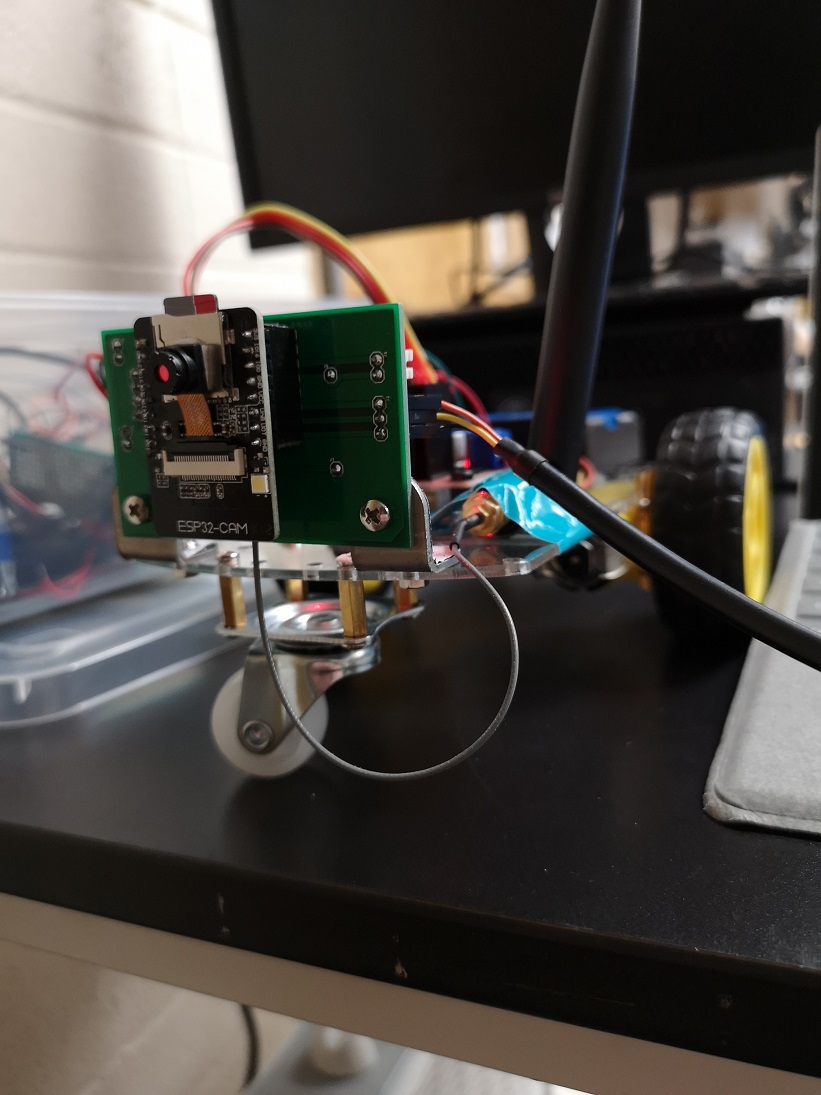
Below are pictures of the finished robot car...
This video displays the operation of the car using the webserver controls and video feed which can be accessed when using the example code...
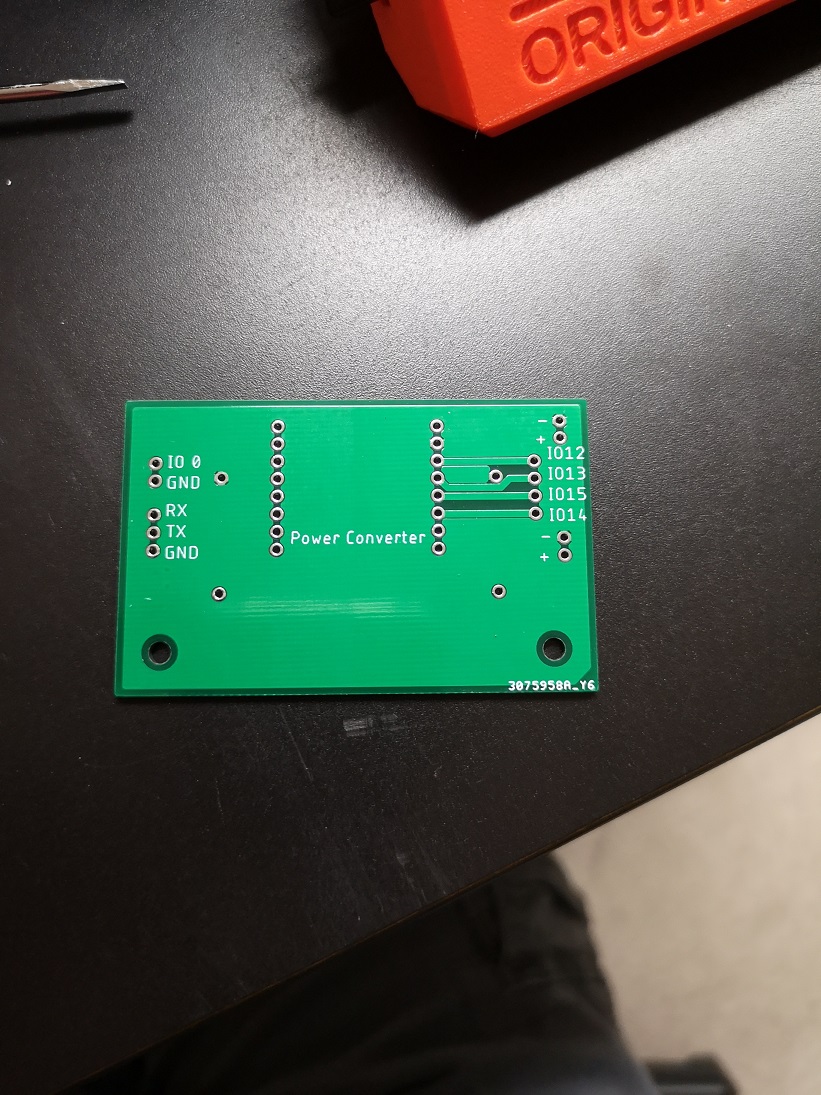
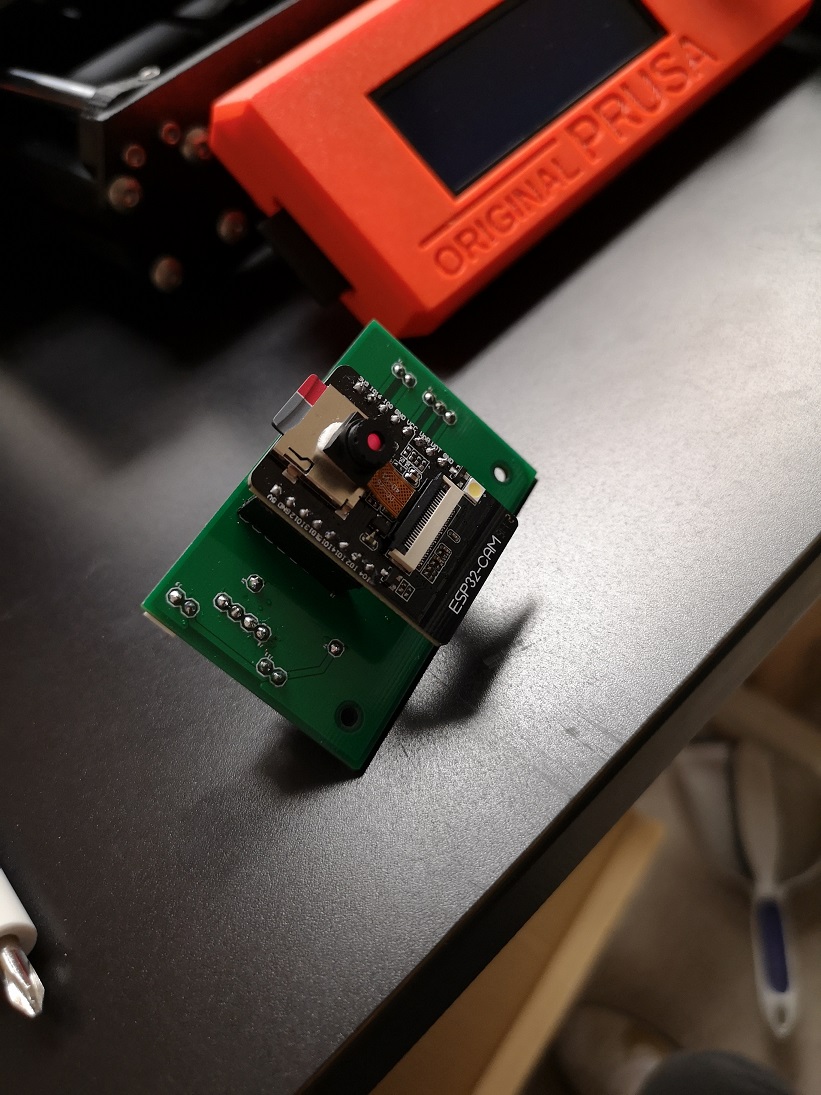
Task 4. Custom PCB
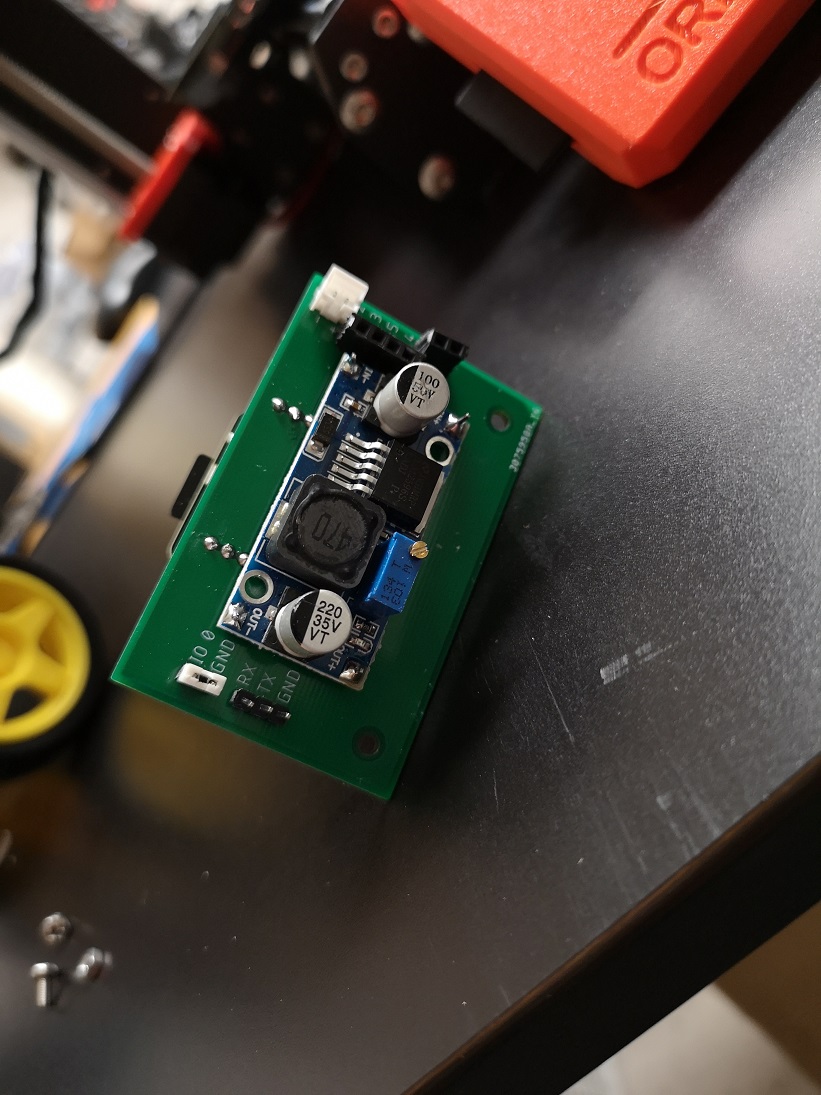
In this task we will use a new PCB designed by us in place of the prototyping PCB boards.
After soldering all the components on the new PCB we can attach it to the robot car.
Now we can verify that the PCB functions properly by testing the operation of the car.
Discussion Overall
the ESP32-CAM continues to be an extremely versatile microcontroller
board with a wide range of functionality. When paired with the video
feed and BPM180 sensor the board could be used to take a variety of
measurements in different areas with visual data to accompany the
readings. The ESP32-CAM is not restricted to one location as we have
seen when it is combine with a small robot car to give it the ability
to maneuver around and travel to a different location all wirelessly.