CE432 Robotics II
HW5: Joystick Tutorial
Name: Audra Benally
Email: albenally1@fortlewis.edu
1. Title: Joystick Tutorial
2. Introduction: For this homework assignment I followed a tutorial
to test a joystick (task 1), to send and receive a signal using the
Open-Spart 2.4 GHz transciever (task 2), and to use the joystick to
send a signal through the transciever to control the NEMA17
stepper motor (task 3).
3. Materials and Methods:
Materials:
- Arduino
- Open-Smart 2.4 GHz transciever
- NEMA17 stepper motor
- Computer
- Joystick
- various lengths of wire
- Tutorial References
- breadboard
Methods:
Use tutorial to connect joystick
to the Arduino. Read through then copy/paste the code to Arduino. Test
the joystick by moving it around and watching the numbers change on the
serial port. Rewire the components to include the sender and receiver
parts. Read and retype the code to send a simple code through the
transcievers before sending the joystick values. When the transcievers
are working properly, retype the code to send the joystick y value.
Finally, rewire the components to include the stepper motor. Recopy and
retype the code to provide a signal to the transcievers to control the
stepper motor. When that is successful, retype the code to let the
signal from the joystick control the stepper motor.
4. Results:
Task 1: Test Joystick
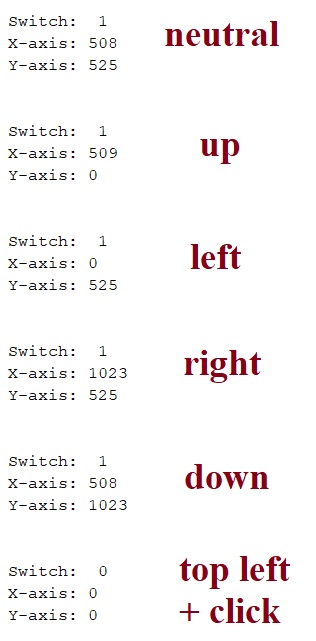
Figure 1. Joystick test
Task 2: Send and Receive Joystick Signal
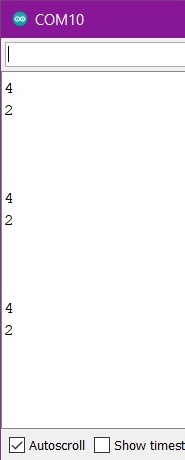
Figure 2. Test signal sent through Open-Smart transcievers.
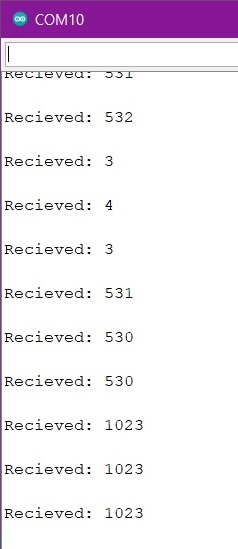
Figure 3. Joystick signal read
from Arduino #1, then sent through the transcievers to be received and
printed by Arduino #2.
Task 3: Use transceivers to use joystick to command the stepper motor.
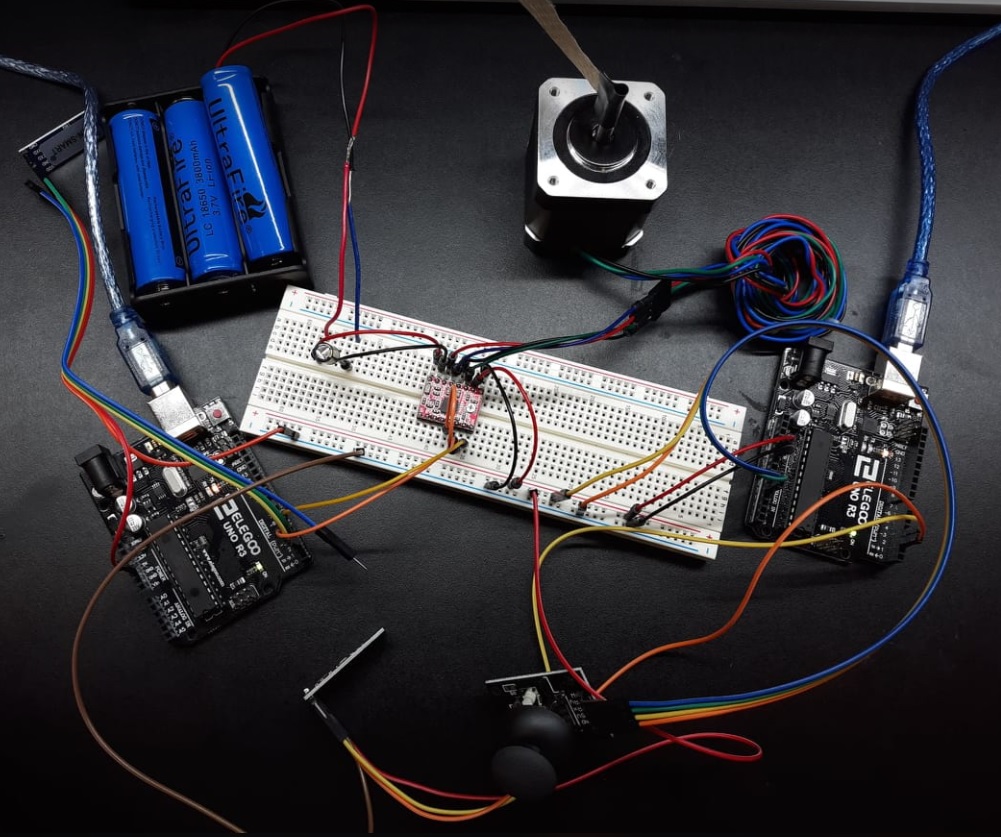
Figure 4. Wiring for the last task.
Video Link: https://youtu.be/knuUG67kjGU
Video 1.
Demonstration video of the joystick controlling the stepper motor using
the circuit in figure 4.
5. Discussion
For this lab the joystick was used to send signals through the
Open-Smart transcievers. The tutorial was easy to comprehend and
follow. The code was comprehensible as well. No big issues were found
in this lab. There was a moment in the last task where I thought the
stepper wasn't moving but then realized it was moving only one step. A
quick change of the code rectified the situation. Overall, this was a
very fascinating lab.