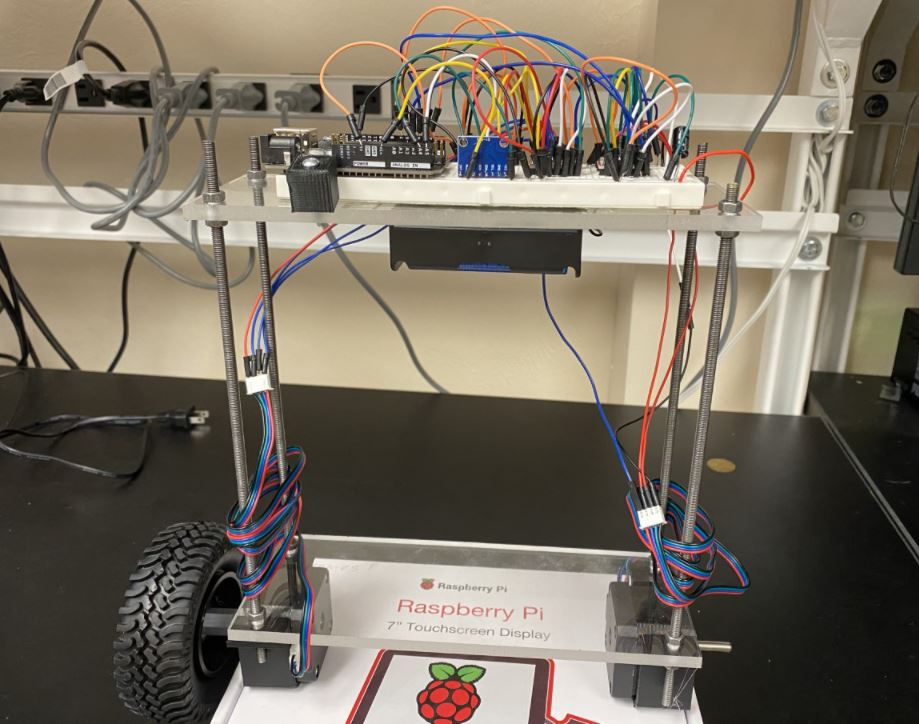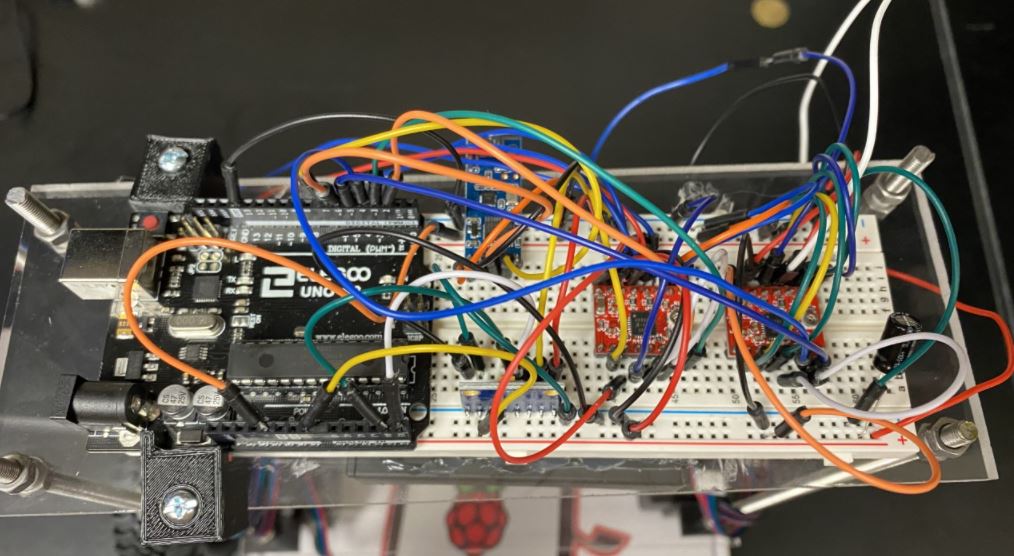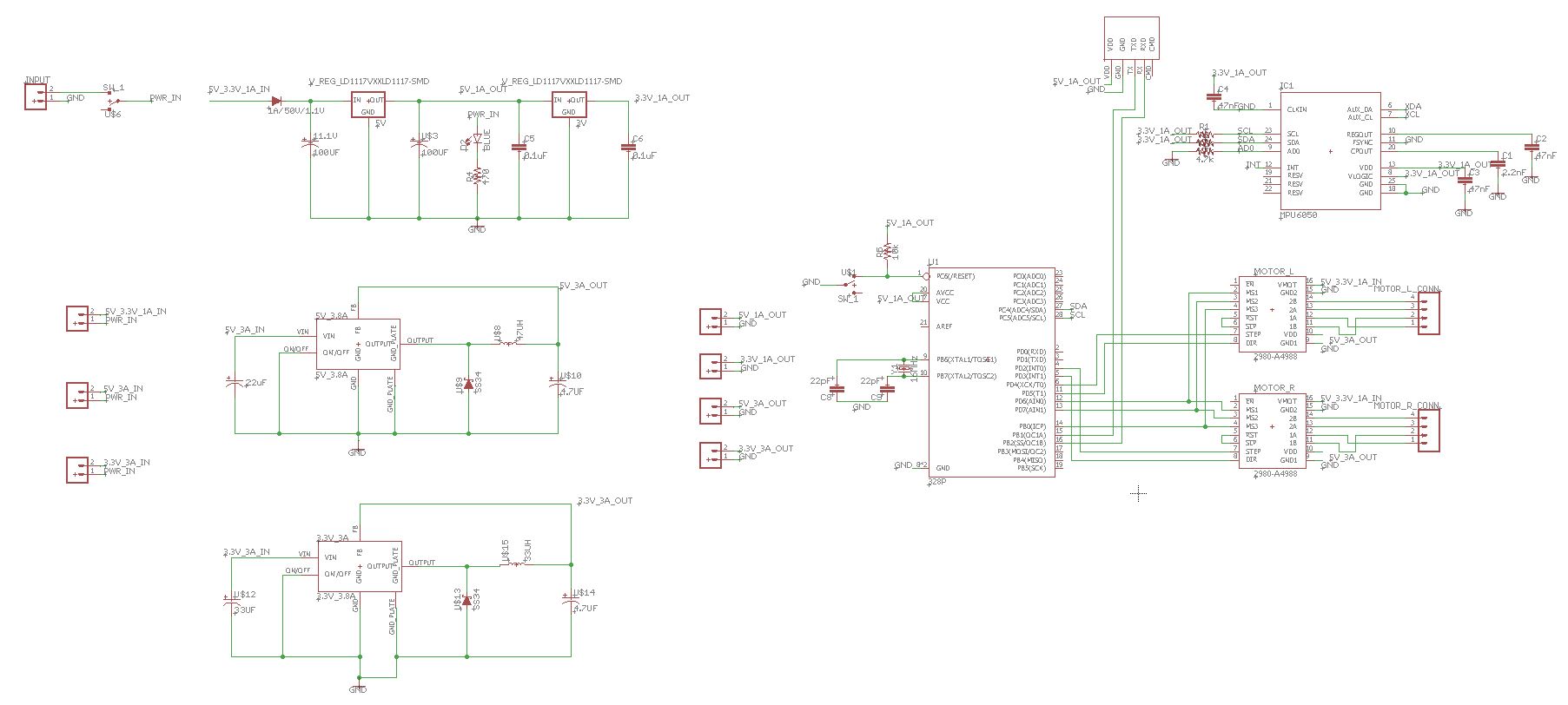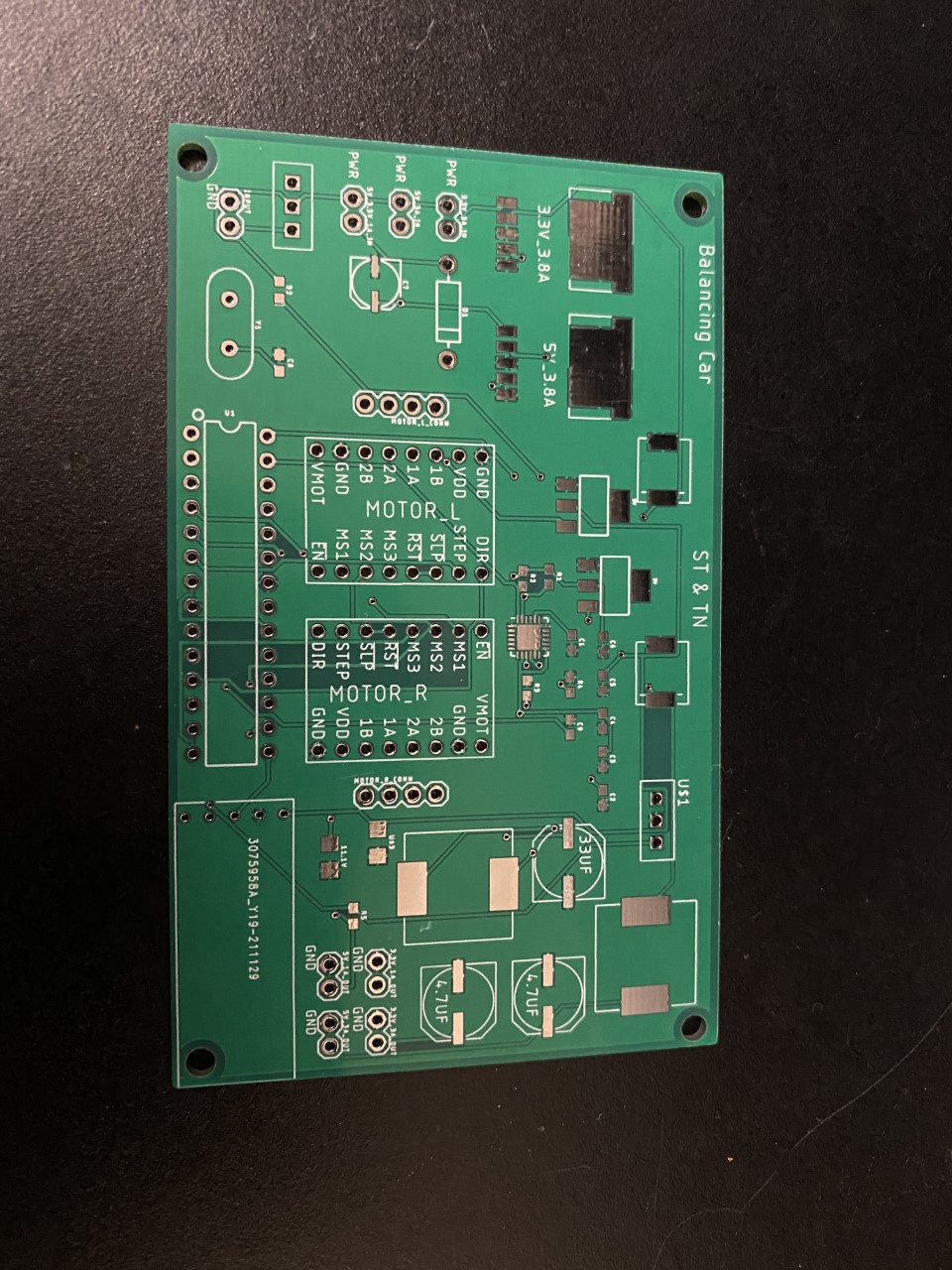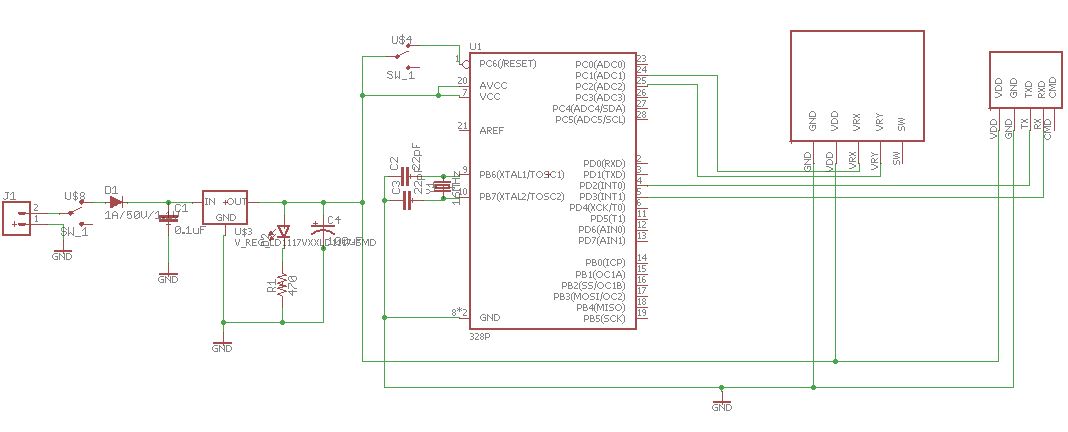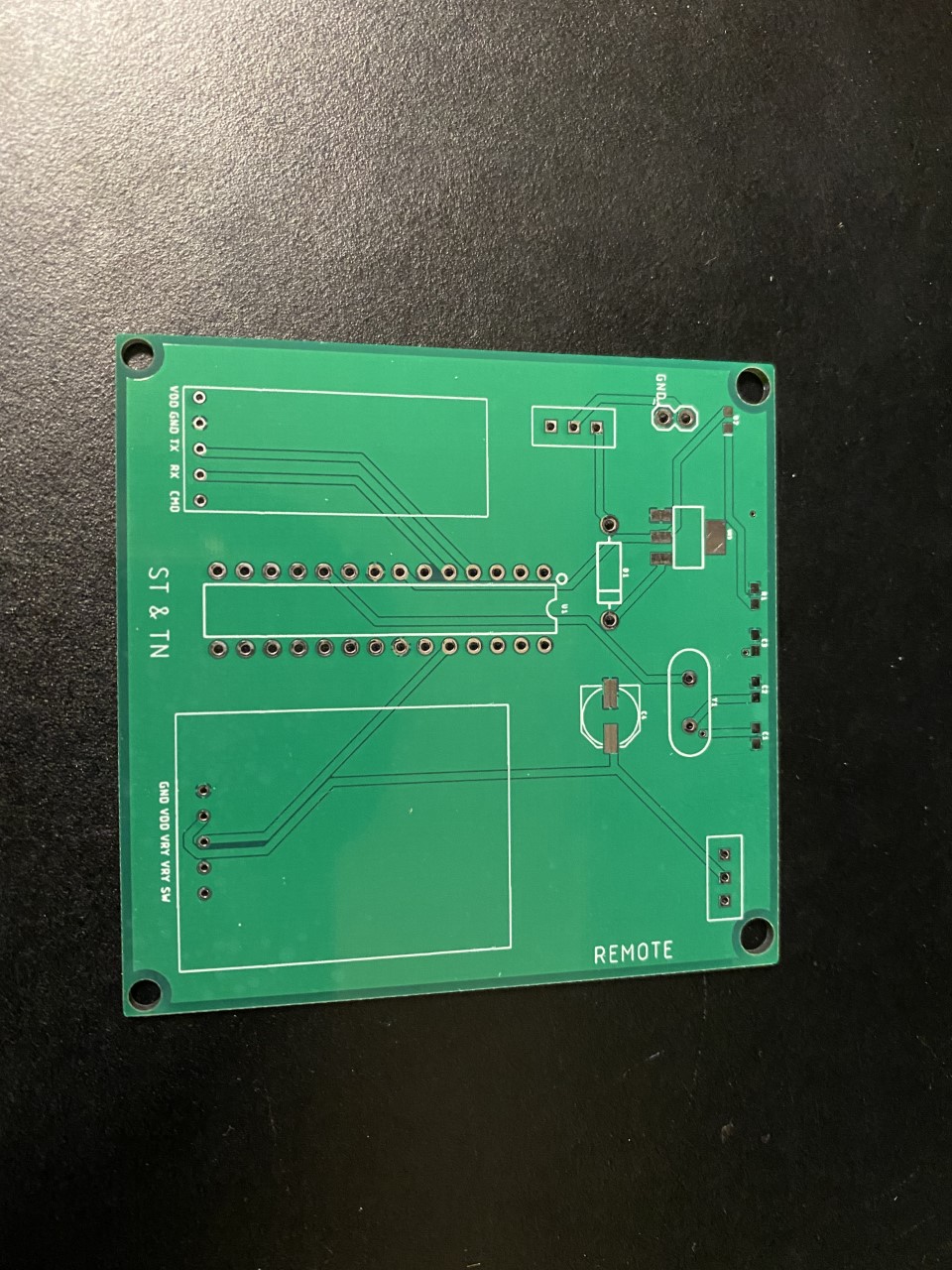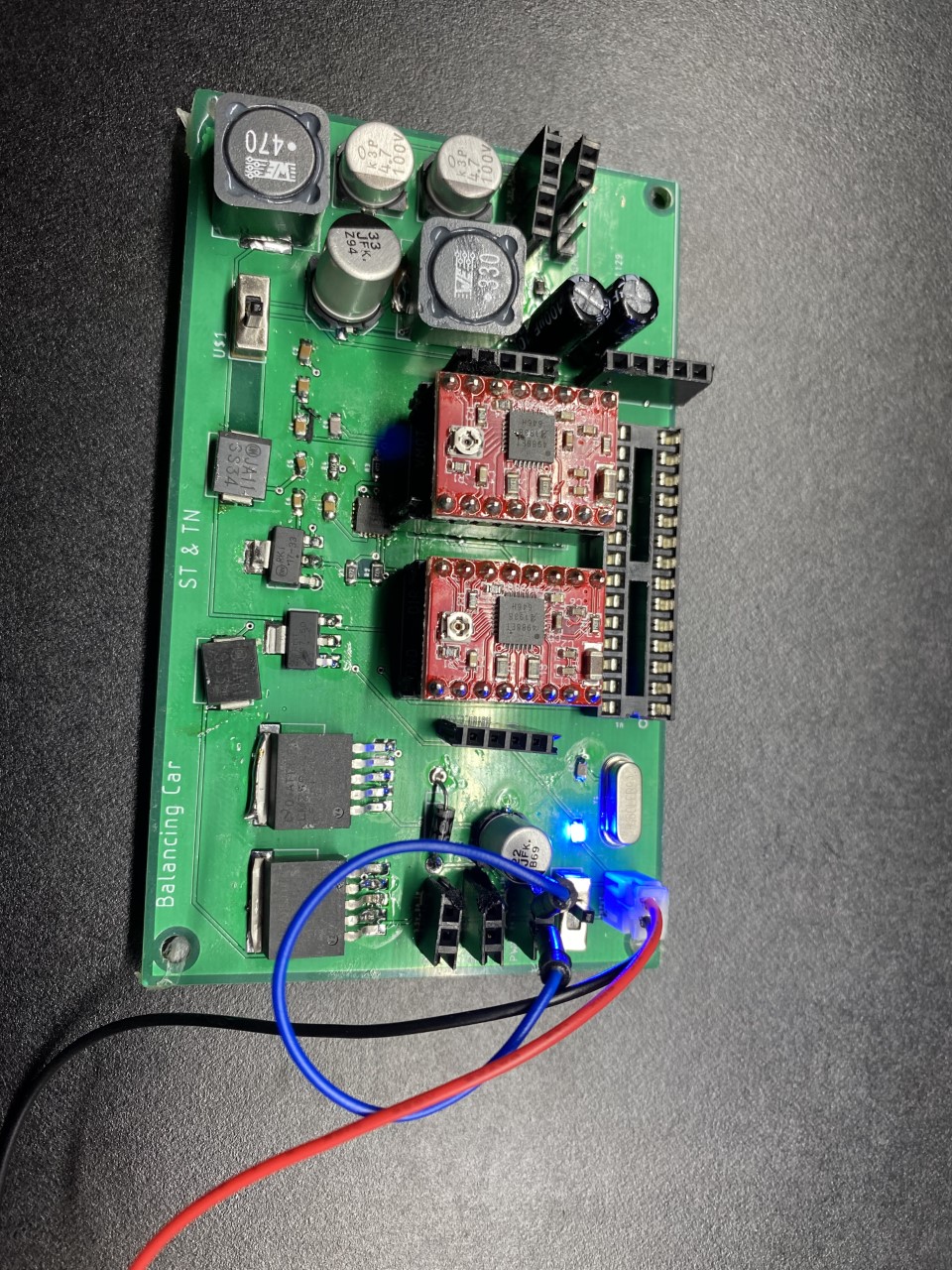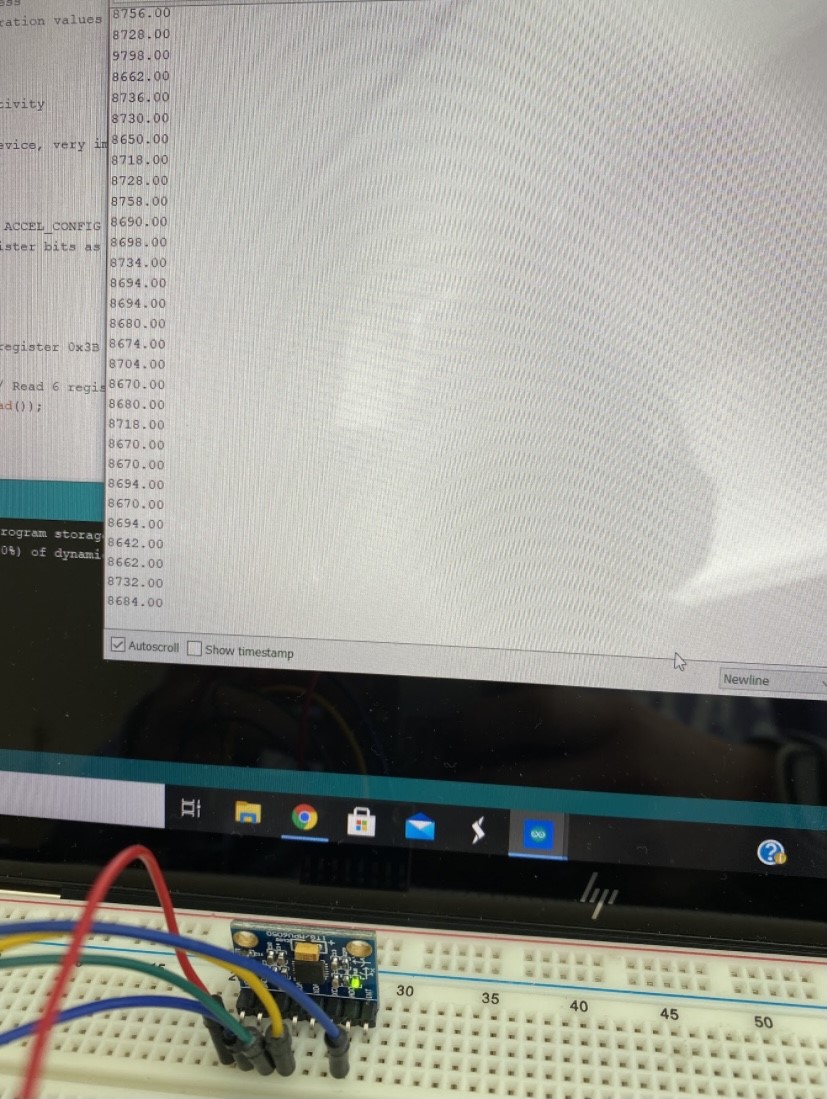
The car was assembled, wired, and tested to make sure the components on the car worked. A PCB was created in Eagle to reduce the amount of wires seen. A PCB for a remote to control the car was also created. The components were soldered onto the car PCB.