1.
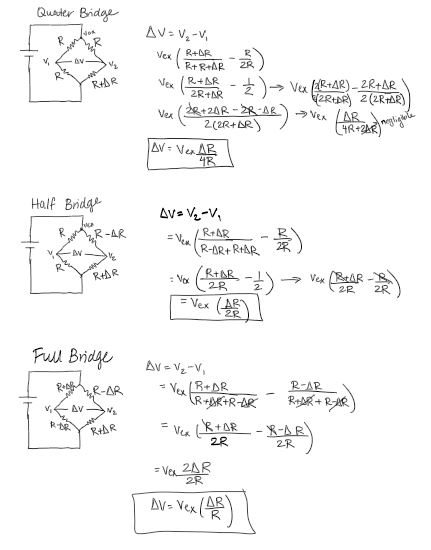
Explain why the full bridge is the most sensitive to one resistance variation
using calculations. The quarter bridge is 1/4 of the sensitivity of the full
bridge and the half bridge is half the sensitivity of the full bridge.
3.
A function generator was used to create a 5V pulse. The Arduino sensed the
pulse and delivered a 400 µs pule 800 µs later on an oscilloscope.
4. A MPU6050 and buzzer were used to create a vibration detector.
5. A joystick was used to control the speed and direction of a NEMA stepper motor.
6.
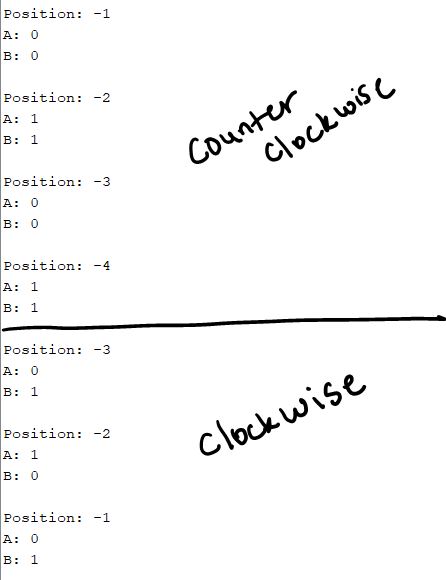
A rotary encoder was in this problem. When the rotary encoder was
turned counterclockwise and A changed from LOW to HIGH state, B was
HIGH. When turned clockwise and A changed from LOW to HIGH, B was low.
3. Discussion
This
homework allowed me to gain experience with different sensors and actuators.
Implementing them on Arduino allows me to see the functionality of the sensors.