CE 432 Practical Robot Design 2023 Fall
HW 8 Encoder Controlled Stepper Motor
Name: Jesse Moder Email:
jmmoder@fortlewis.edu
The goal of this tutorial was to control a stepper motor with ULN2003A motor driver
and an encoder.
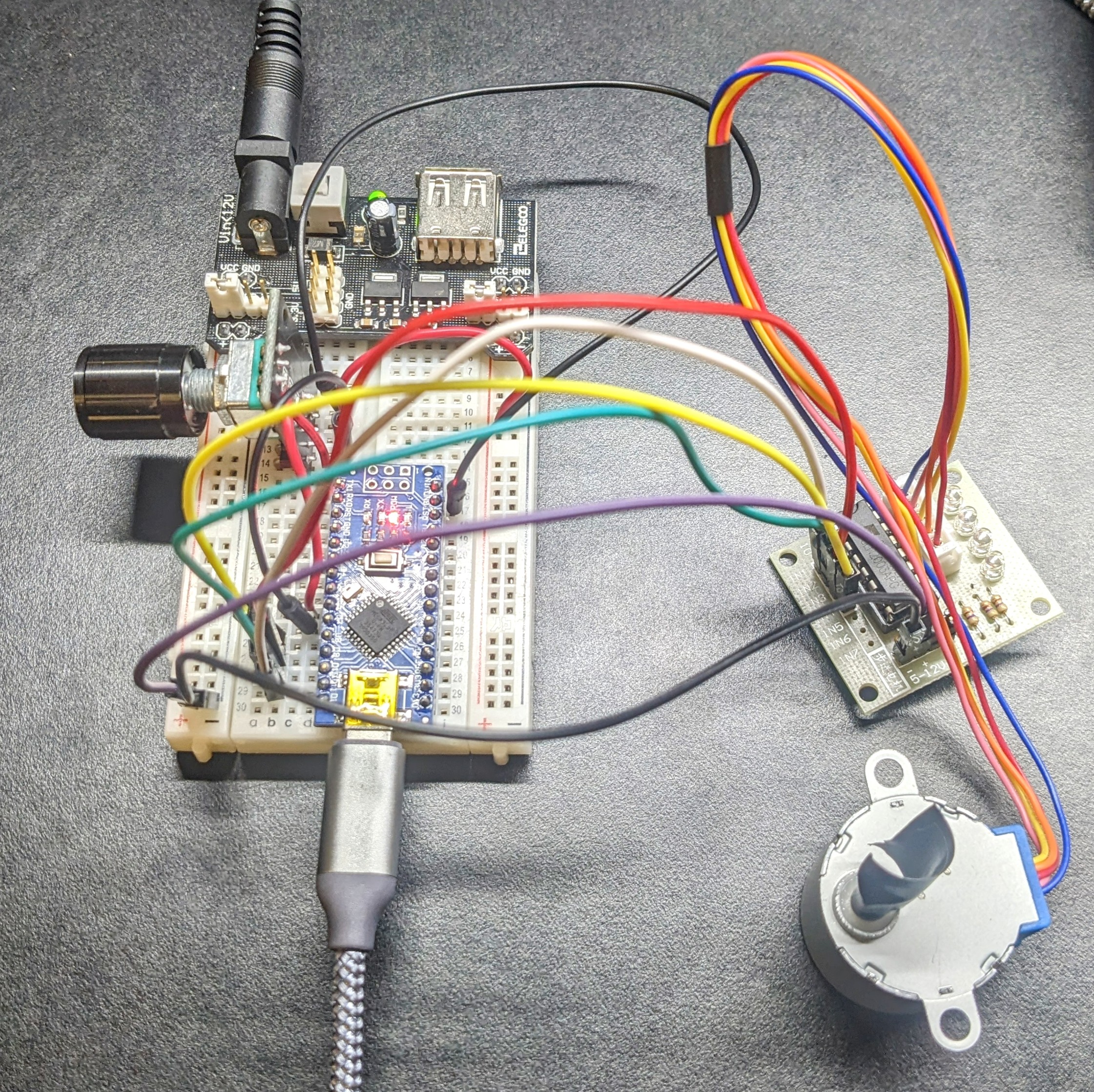
The following image shows the breadboard connections using an Arduino Nano,
5V power supply, an encoder, a stepper motor, and a ULN2003A motor driver,
connecting following this tutorial.
This video shows the stepper motor rotating 360 degrees clockwise and then
counterclockwise to demonstrate the correct connections were made.
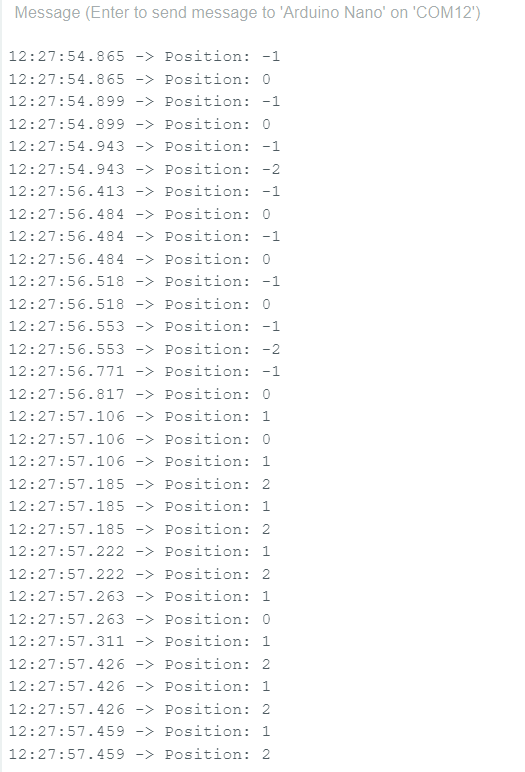
This image shows the serial monitor readings of the encoder when turning
the knob clockwise.
This video shows the stepper motor being controlled by the encoder.
The Arduino code is located in the 432HW8 file. This tutorial was very useful for controlling
precise movements of a stepper motor with an encoder. The applications for robot control and
tuning parameters will be useful for controlling the balancing robot.