CE 432 Practical Robot Design 2023 Fall
HW 3
Name: Jesse Moder Email:
jmmoder@fortlewis.edu
The first two tasks of this assignment were to use the ESP32 to stream video and video with sensor readings on a web server.
The third task was to construct a two-wheeled streaming robot controlled from a web server.
The fourth task was to demonstrate smooth acceleration of the robot in-person.
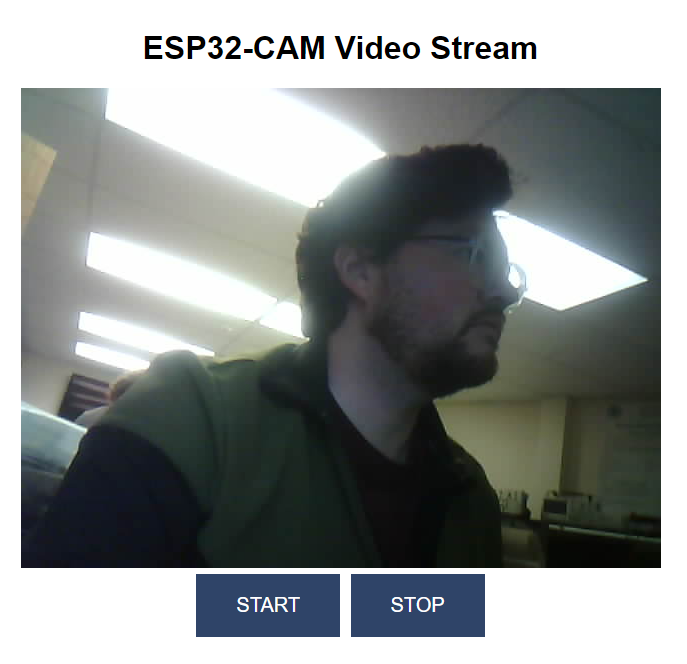
Task 1: Start and stop video streaming on a web server
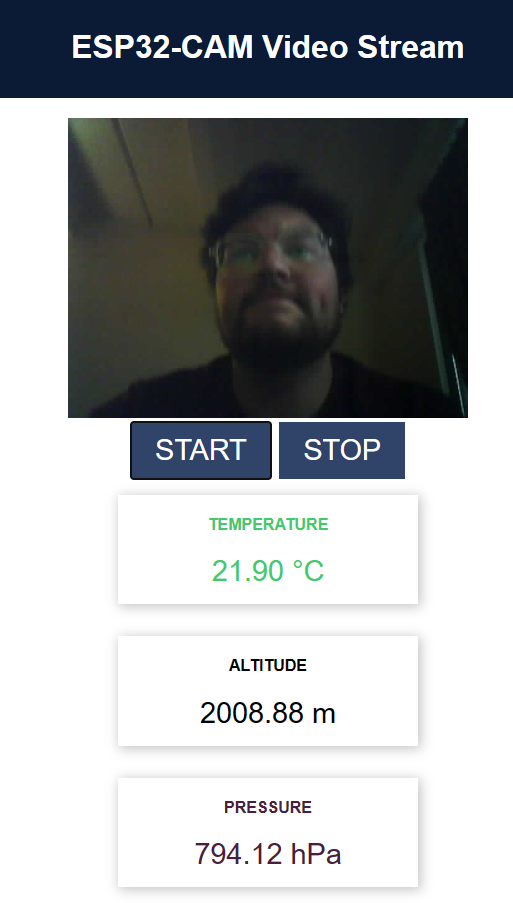
Task 2: Video streaming with sensor readings
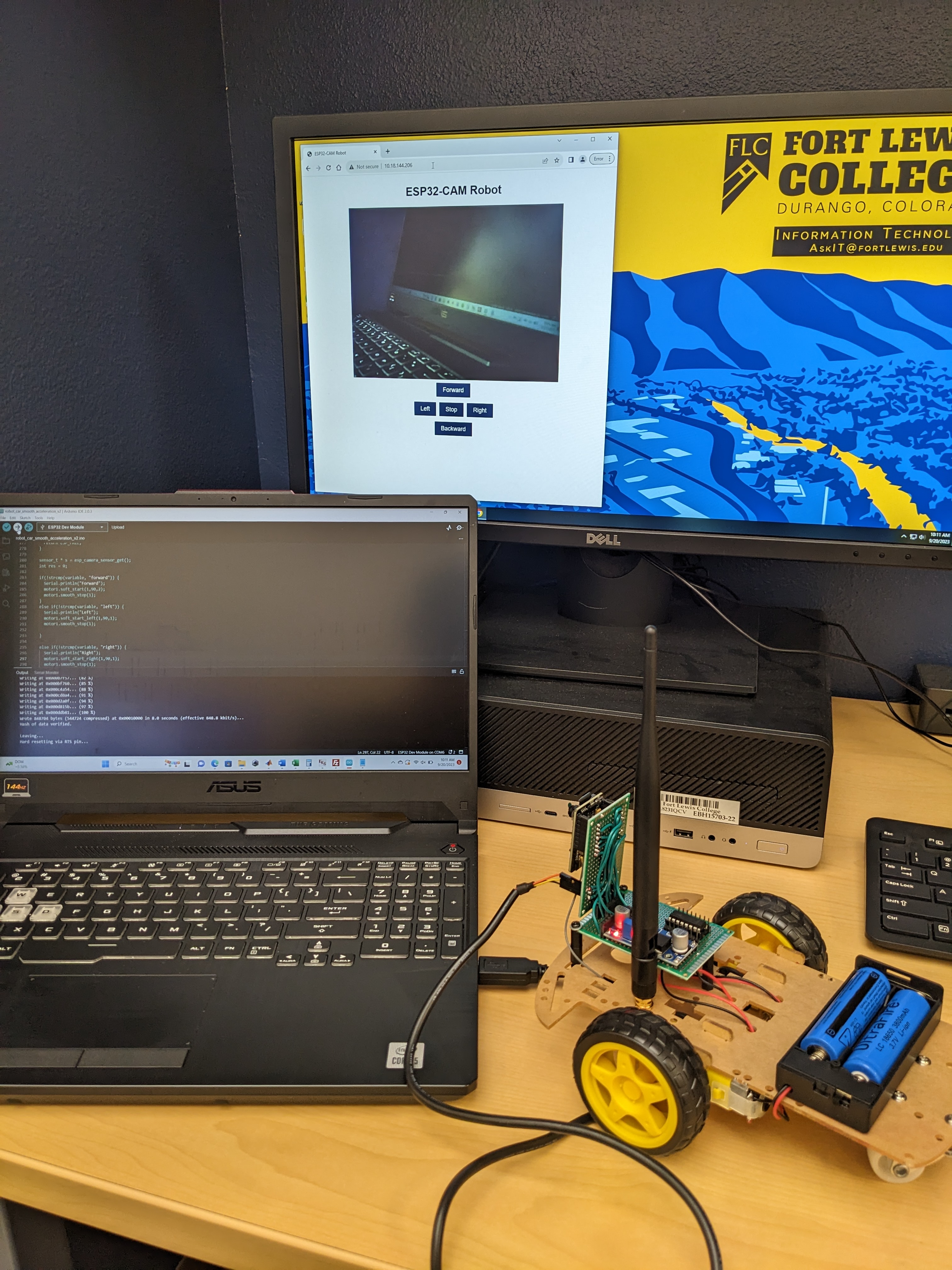
Task 3: Remote controlled car robot with a camera
Task 4: Solve acceleration issue
The code is located in the folder under 432HW3.
This project was very fun to learn to build and control and robot car wirelessly. It was good to practice soldering for the
prototype board conections for when the PCB is delivered.
Smooth acceleration was acheived using for loops to step up the speed each loop until the desired speed was acheived,
then to step down through the for loop to smoothly stop.
Wireless robot control has many interesting applications including
construction, warehouse organization, manufacturing, hobbies, and education.