CE432 Robotics II
Lab 3: Video Streaming Web Server and Robot Car
Name: Audra Benally
Email: albenally1@fortlewis.edu
1. Title: Video Streaming Web Server and Robot Car (Module 4 on Rui's Textbook)
2. Introduction: In this lab we followed several video streaming
tutorials in Rui's ESP32-CAM textbook. One big goal of the lab was to
build a working remote control robot car using the given parts. Another
goal was to design a PCB in Eagle to replace the PCB board that will be
used to wire up the robot car in this lab.
3. Materials and Methods:
Materials:
- ESP32-CAM
- Computer
- Various connector wires
- Soldering Station
- Tutorial References
- Robot Car kit
- Various screws and nuts
Methods:
Follow the given tutorials from
the ESP32-CAM textbook and learn how to video stream using the
ESP32-CAM. Then utilise the soldering stations and tools in the lab to
wire up
and connect the robot car to the ESP32-CAM microcontroller. Then create
a PCB to replace the prototype PCB board used to wire everything
together.
4. Results:
Task 1:
Figure 1. Video streaming
Task 2:
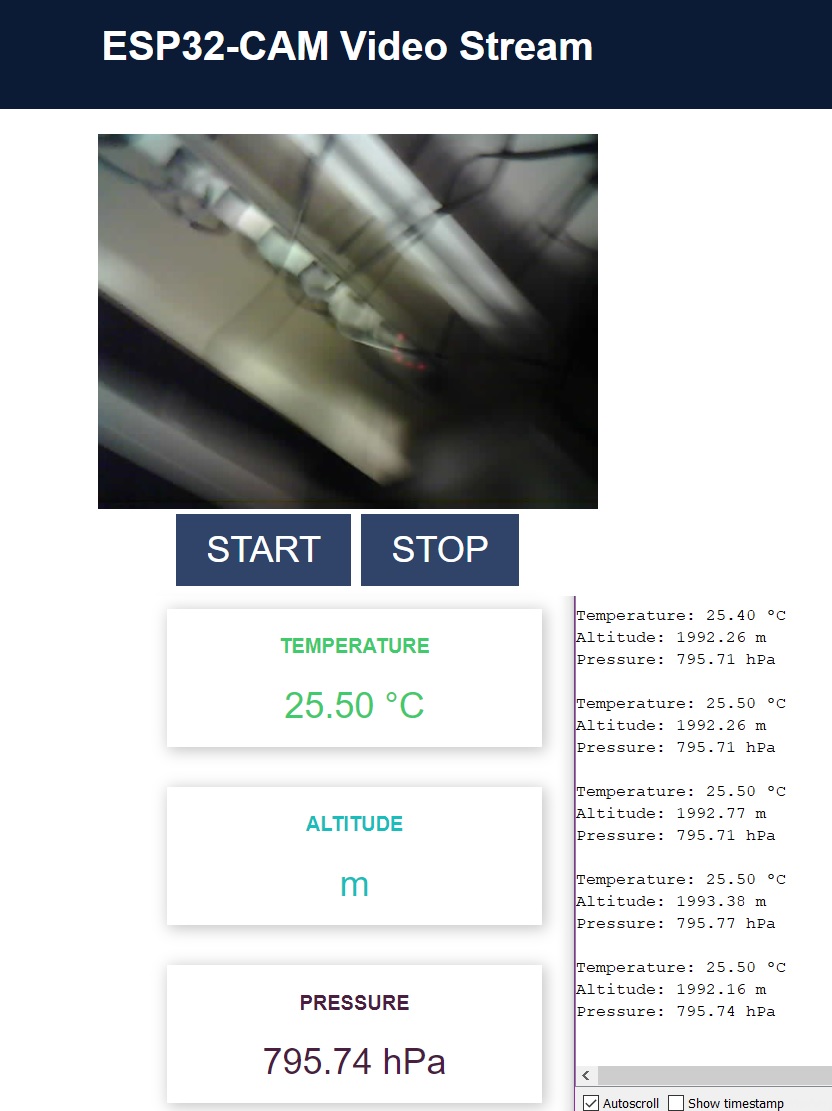
Figure 2.
Video streaming with BMP180 sensor readings. The Altitude still hadn't
come up after about 10 minutes. Sensor was taking altitude readings
though.
Task 3:
Video Link: https://youtu.be/4SYrjc5pliU
Video 1. The Robot Car in action.
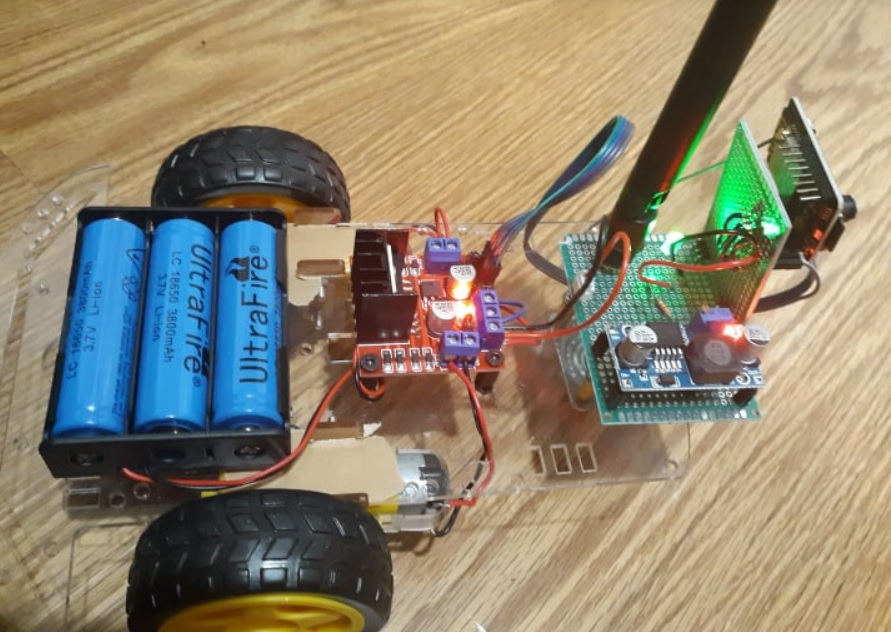
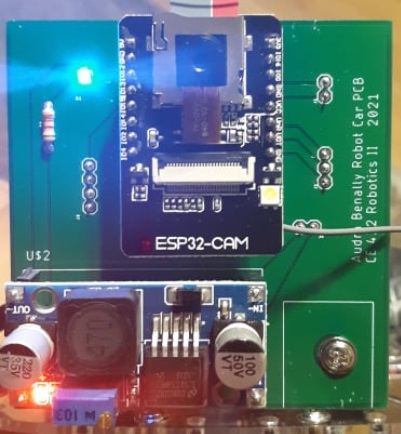
Figure 3. Finished Robot Car.
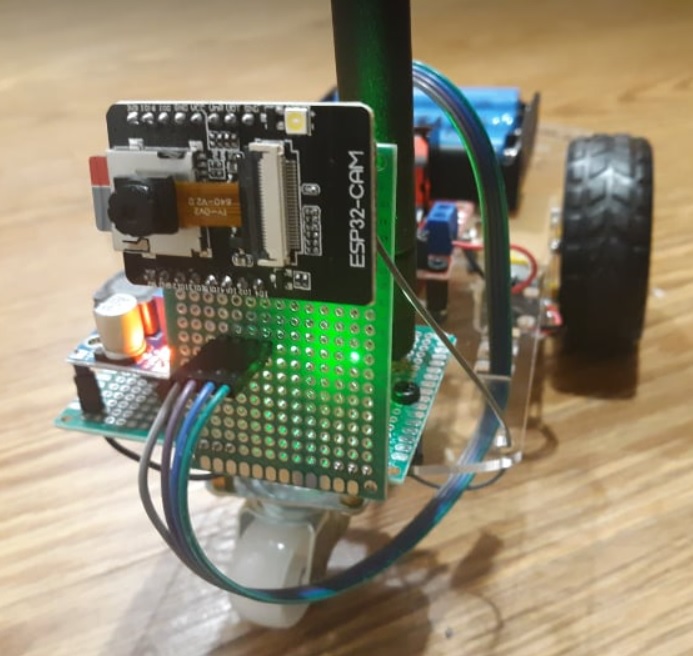
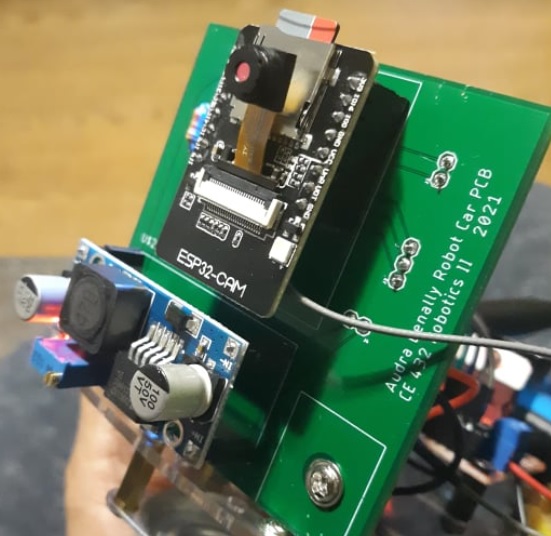
Figure 4. Front of Robot Car.
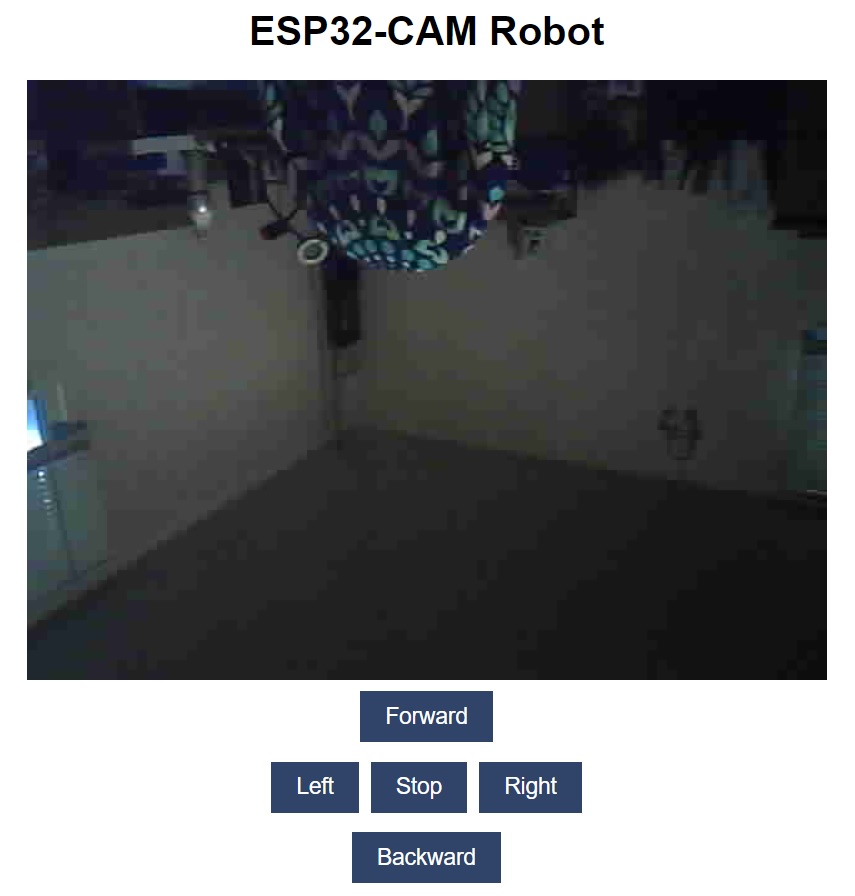
Figure 5. Upside down camera video from Robot Car.
Task 4:
Video Link: https://youtu.be/RmcNu9XxU0U
Video 1. The PCB Robot Car in action.
5. Discussion
For this lab the video streaming tutorials were very straightforward
and easy to follow. I hadn't gotten all my soldering done by the time
the lab was due so I am turning this lab in a day late. I was able to
get the car to work and move around using the online buttons.
Unfortunately I wasn't able to get the camera to rotate. I had issues
like this in the past (coding issues) and was hoping to avoid it by
mounting the camera on its side. I put it on the wrong side though and
the image ended up being upside down. I tried to follow the rotation
example in Rui's textbook from page
142 where the code made a button that would rotate the picture. I
started on the PCB board but haven't gotten very far. It has been
awhile since I've used the Eagle software so it's pretty slow progress.
This was a really fun lab though. I wish I was able to start on it
earlier but unfortunately my semester so far has been crazy and
unpredictable. Also, my code is labeled "T3code.txt" in my Tutorial 3
folder.