The datasheet can be
downloaded here,
The Torque Curve can be downloaded here.
Watch: How a stepper motor works?
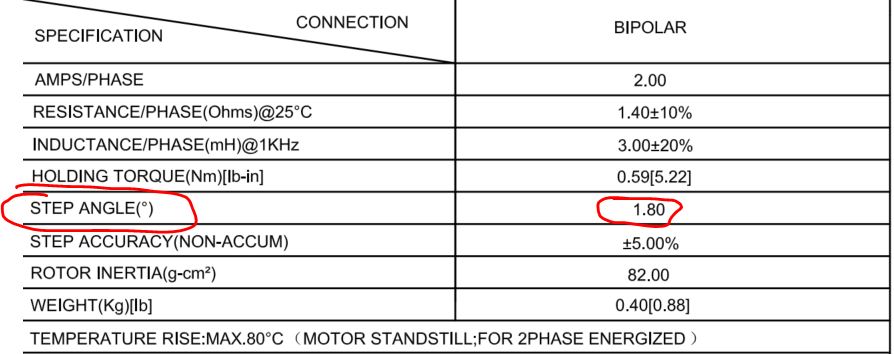
In NEMA17's datasheet, the
STEP ANGLE parameter tells you the 'steps
per revolution' you have to define in your sketch. Every step moves 1.8
degree, there are 360 degrees per revolution so totally 200 steps.
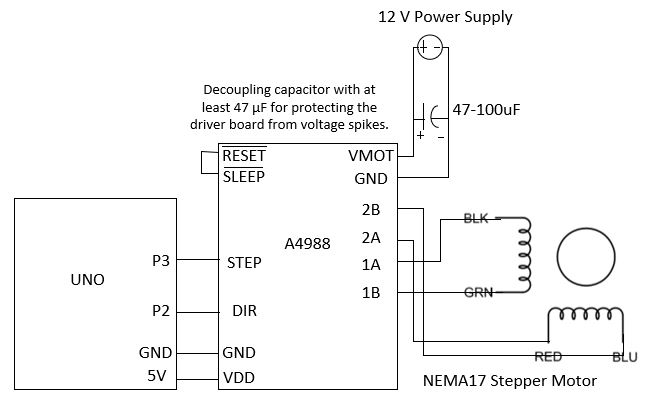
Use
the A4988 stepper motor driver
A4988 is an alternative
product to the L298N driver.
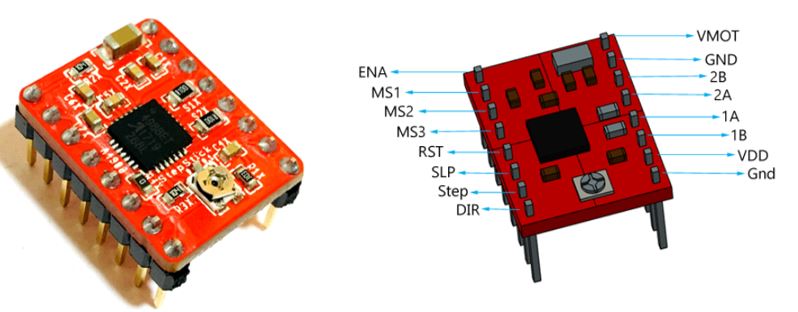
The A4988 is a microstepping
driver for controlling bipolar stepper
motors which has built-in translator for easy operation. This means
that we can control the stepper motor with just 2 pins from our
controller, or one for controlling the rotation direction and the other
for controlling the steps.
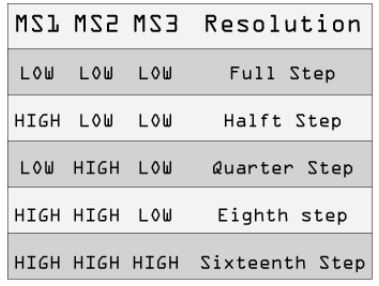
The Driver provides five
different step resolutions: full-step,
haft-step, quarter-step, eight-step and sixteenth-step. Also, it has a
potentiometer for adjusting the current output, over-temperature
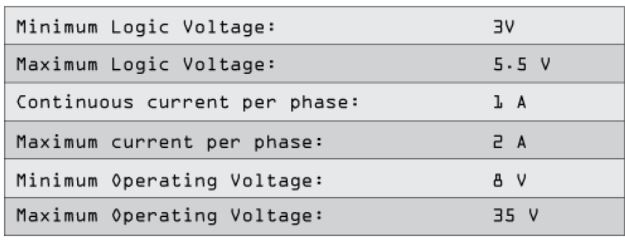
thermal shutdown and crossover-current protection. Its logic voltage is
from 3 to 5.5 V and the maximum current per phase is 2A if good
addition cooling is provided or 1A continuous current per phase without
heat sink or cooling.
The next two 2 pins, Step and
Direction are the pins that we actually
use for controlling the motor movements. The Direction pin controls the
rotation direction of the motor and we need to connect it to one of the
digital pins on our microcontroller. With the Step pin we control
the mirosteps of the motor and with each
pulse sent to this pin the motor moves one step. So that means that we
don’t need any complex programming, phase sequence tables, frequency
control lines and so on, because the built-in translator of the A4988
Driver takes care of everything. Here we also need to mention that
these 2 pins are not pulled to any voltage internally, so we should not
leave them floating in our program.
Next is the SLEEP Pin and a
logic low puts the board in sleep mode for
minimizing power consumption when the motor is not in use. Next, the
RESET pin sets the translator to a predefined Home state. This Home
state or Home Microstep Position can be seen from these Figures from
the A4988 Datasheet. So these are the initial positions from where the
motor starts and they are different depending on the microstep
resolution. If the input state to this pin is a logic low all the STEP
inputs will be ignored. The Reset pin is a floating pin so if we don’t
have intention of controlling it with in our program we need to connect
it to the SLEEP pin in order to bring it high and enable the board.
The next 3 pins (MS1, MS2 and
MS3) are for selecting one of the five
step resolutions according to the above truth table. These pins have
internal pull-down resistors so if we leave them disconnected, the
board will operate in full step mode. The last one, the ENABLE pin is
used for turning on or off the FET outputs. So a logic high will keep
the outputs disabled.
Datasheet of the A4988 driver
IC can be downloaded here.
The module's pinout and specs can be
found here.
Some notes:
- Every pulse will create one step, which is 1.8 degree (if it is a fll
step, MS1 MS2 MS3 is 0 0 0), the pulse width cannot be too small.
The example uses 500 us as the pulse width and it works fine. I tried
400 us and it doesn't work. You can also use wider pulses, say 1000 us,
the rotation speed will be slower.
- 7.4 V for VMOT also works which means you can use a 2-cell lipo battery.
- The 47 - 100 uF cap shorting VMOT to GND can be absent without
causing anything, but it is highly recommended to have it in place.
Use
the A4988 driver and a
potentiometer to adjust the motor speed in realtime.
Follow the instructions in
section 1.2 and try to repeat the same
results using the A4988 driver.
The demonstration video:
2. Test
the MPU6050 accelerometer/gyroscope sensor 2.1
Understand acceleration and angular velocity
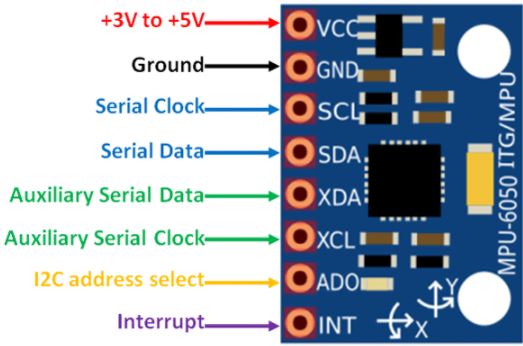
The pinout of MPU-6050
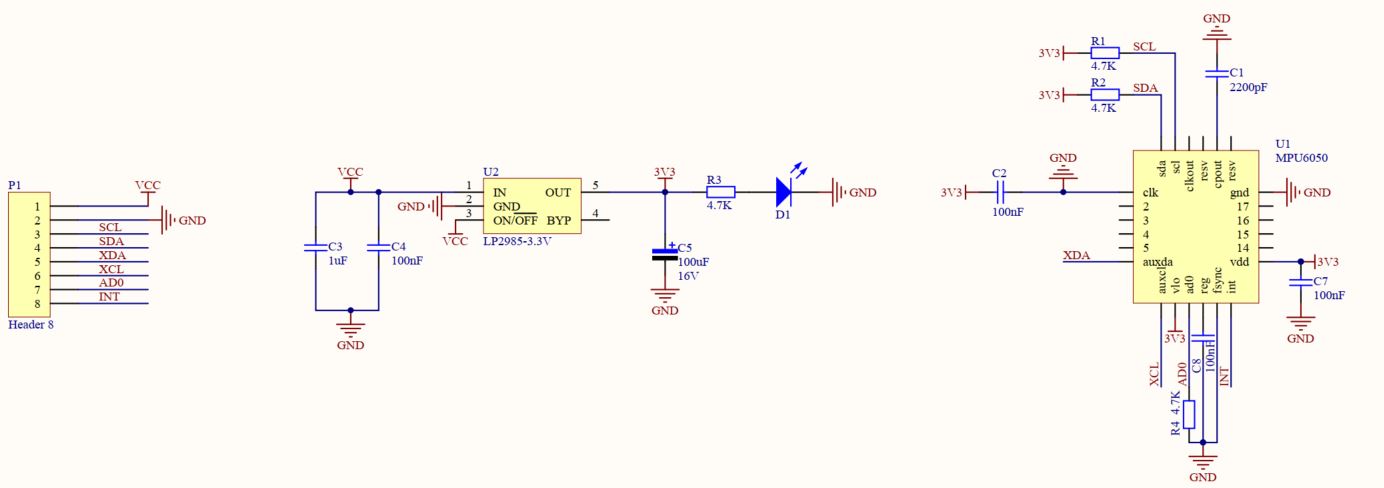
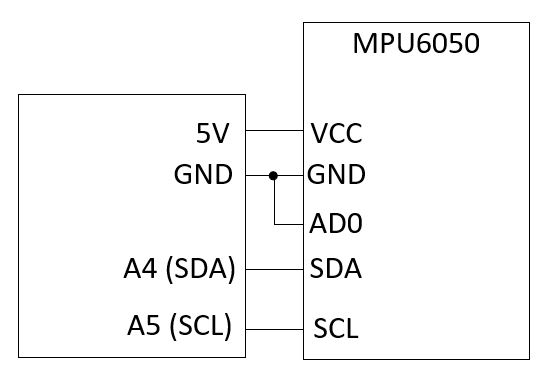
The schematic of the module:
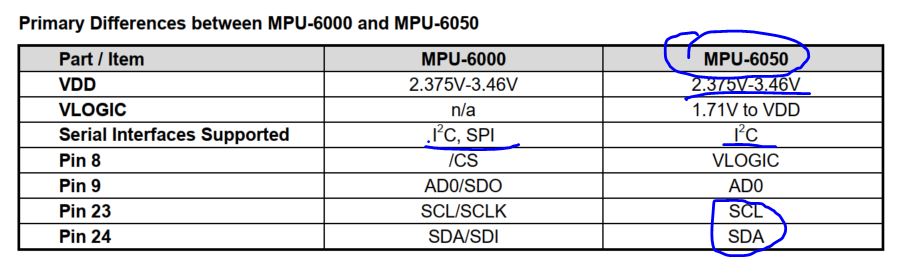
Table of voltage ratings:
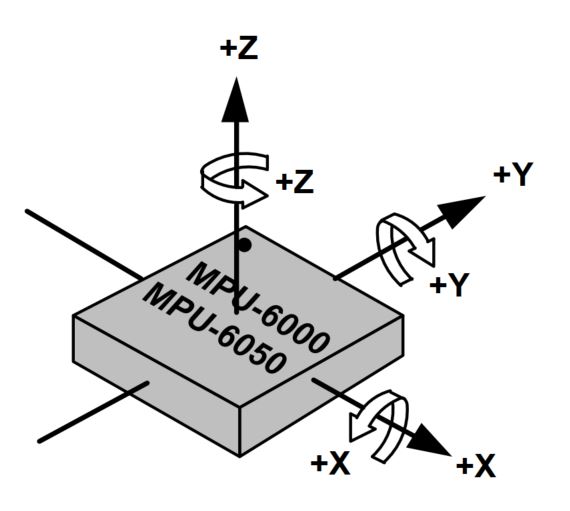
MPU-6050 Axis:
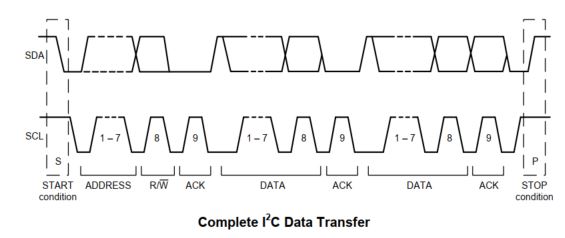
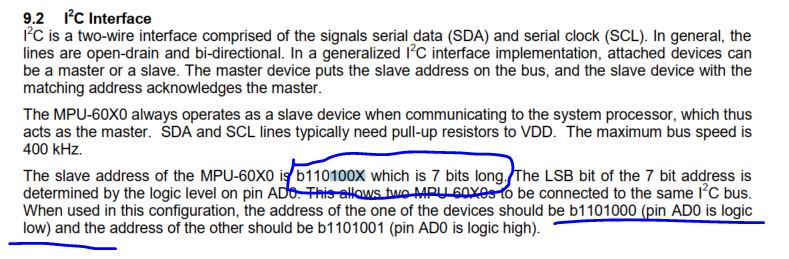
MPU I2C communication:
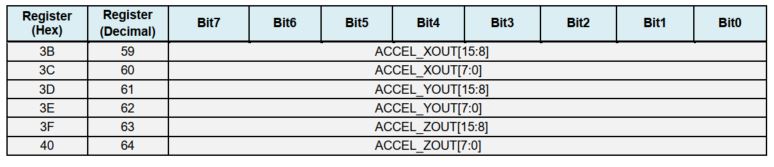
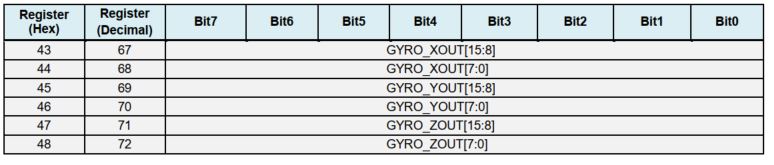
The key registers:
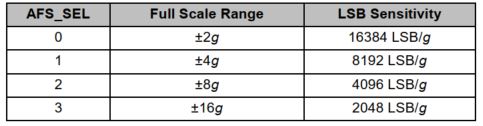
Binary readout data / LSB Sensitivity = xxx LSB / (LSB / g) = xxx g.
Binary readout data / LSB
Sensitivity = xxx LSB / (LSB / (deg/s)) = xxx deg/s. This is the
angular velocity but how do you get the rotated angles in realtime? -
You must know the time spent for each 'void loop ()' function.
Use the following software
and hardware to test your accelerometer and gyroscope before it's being
connected to the car.
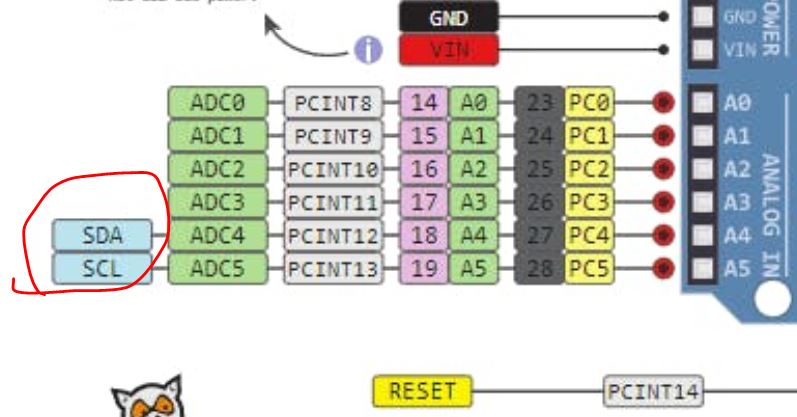
From the UNO's
pinout, you can idenfy
the I2C pins are A4 and A5:
Make the following hardware
connections:
Use this
example to test your
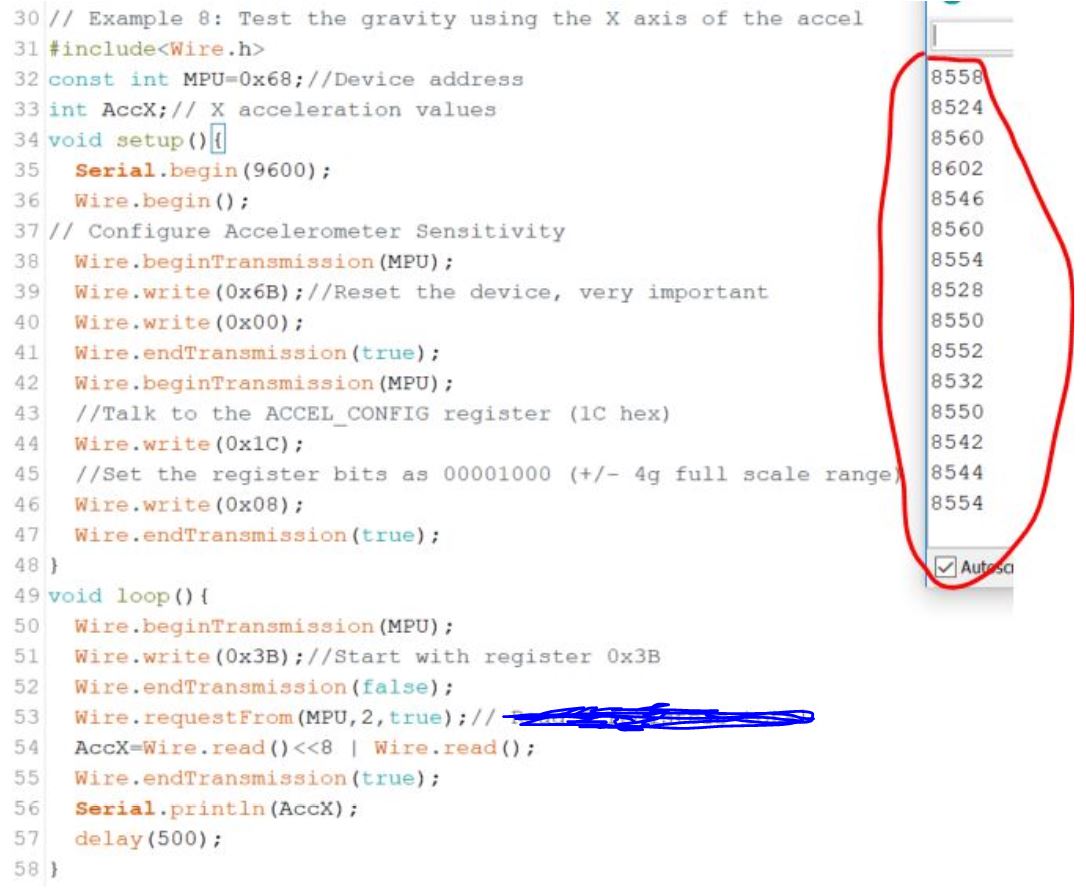
acceleration and gyroscope readings respectively. Check out MPU6050's datasheet and register
map if you have questions
about the example sketch.
By holding the MPU6050 sensor
at different gestures, you
can understand what the accelerometer and the gyroscope are measuring.
The
Gyro measures angular velocity. Therea are three axes X, Y, and Z, the
direction of them are indicated on the module's PCB board.
The Z axis in the snippet
above points out of your monitor and perpendicular to the PCB board.
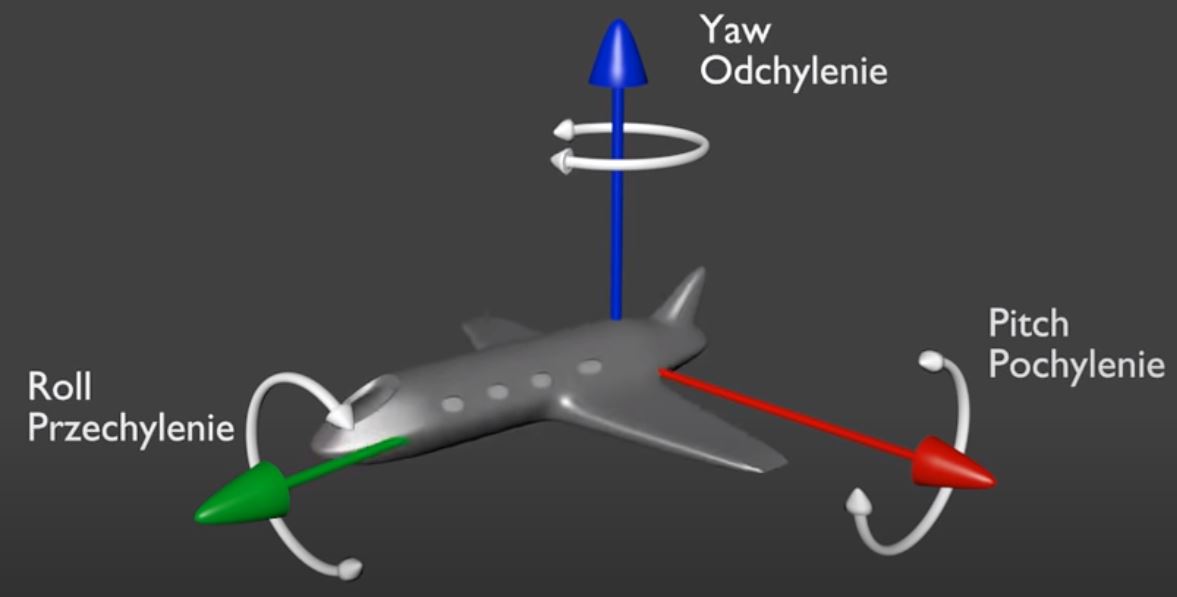
Let's take the airplane's X, Y, and Z axes as the example.
For airplane control, Pitch, Roll and Yaw are defined as the
rotation around X, Y and Z axis. Below as a picture to illustrate the
definition.
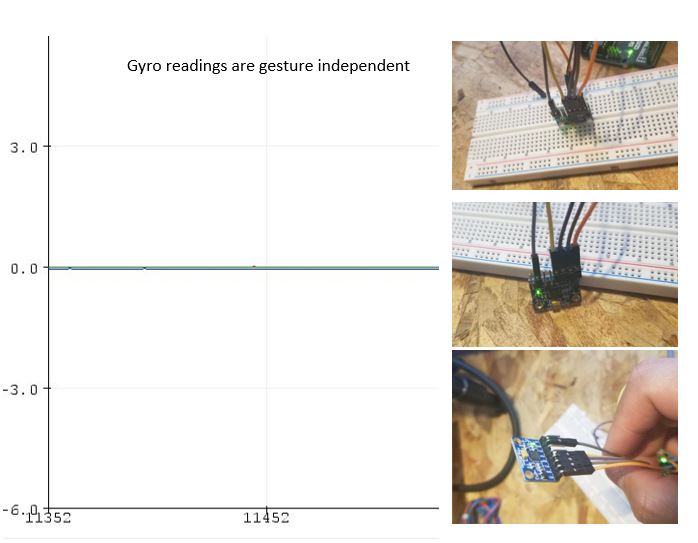
If the MPU is idle, no
movement and no rotation, the Gyro readout should be all zeros.
Look at the following
demonstration that I held the MPU module at different angles
statically, the readout is always zero.
However, the acceleration
readout values reacts to the angular changes. (I have converted the unit of the readings to
'g' for the following tests).
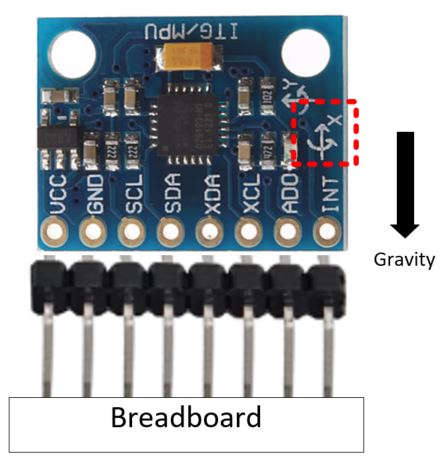
Keep
in mind that gravity always exists so if you plug your MPU
module on a breadboard vertically as follows:
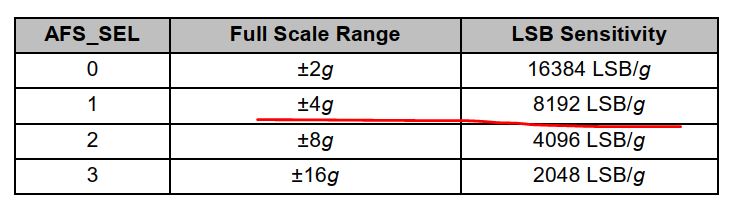
You are supposed to receive
something close to 8192 for Accel_X.
The number '8192' comes from the following
configuration according to the register map.
(All these 8500+ values are supposed to be 8192 but you can tell the
level of the deviations by holding it by hand and the system errors of
itself. The values are positive so
disregard the direction of the arrow printed on the MPU module for the
X axis. )
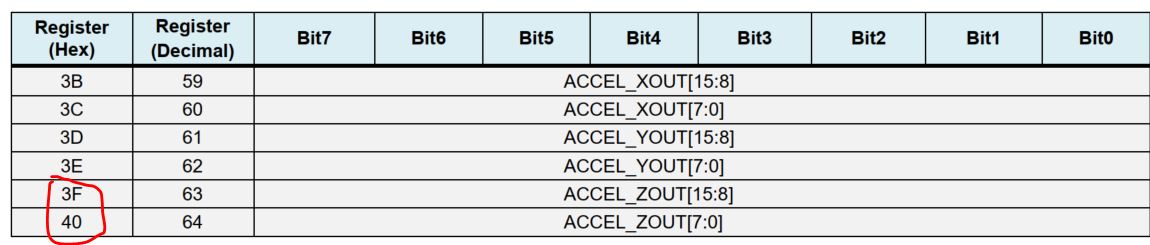
The code starts with the 0x3B register
for data reading because the 2-byte X axis data is stored in 0x3B
and 0x3C.
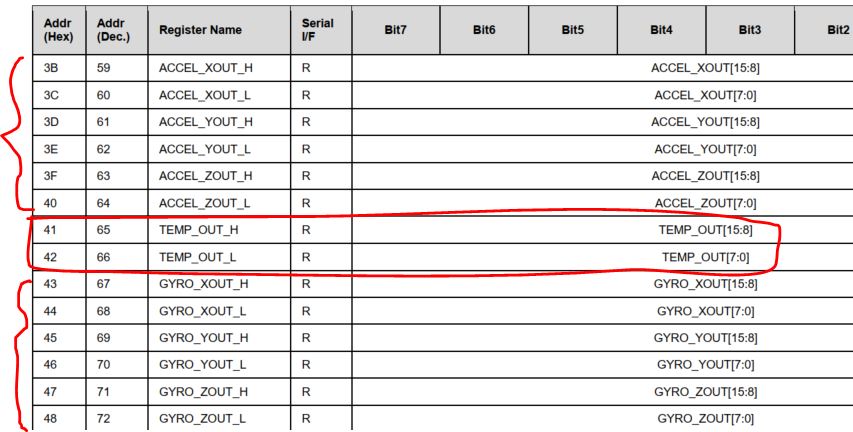
When you need both the Gyro and Accel readings, don't forget to skip 0x41 and 0x42 which are temperature data:
2.2 Angle
calculation
MPU is able to measure the
angles by combining the information from the accelerometer and the
gyroscope.
If the MPU module is inserted
to the breadboard perpendicularly, the direction of the three axes are
as follows: Z front/back, X is up/down, and Y is left/right:
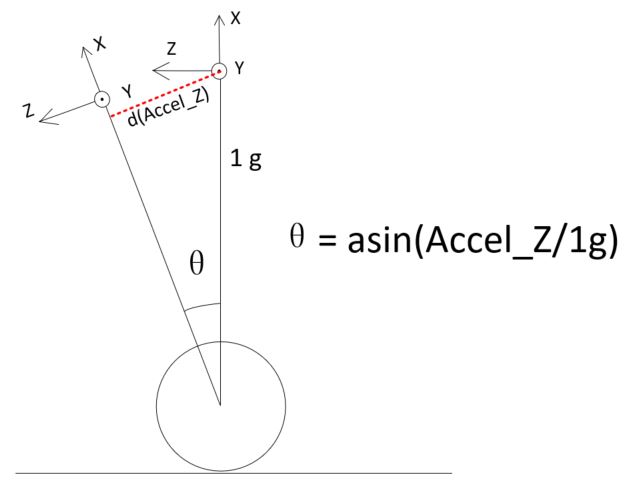
If the car leans forward, the
wheels should move forward to prevent it
from tipping over. If it leans backward, wheels should move backward. The vertical acceleration is
always 1 g, so the angle can be calcualted using the asin() fuction:
Theta = asin(Accel_Z/1g). The result of this equation
is in radians, to convert it to angles, you
need to multiply it by 180/pi (or 360/2pi), which is 57.29578: Theta =
asin(Accel_Z/1g) x 57.29578. To implement it in Arduino:
asin((float)accelerometer_data_raw/8192.0)*
57.29578 // 8192
is the LSB/g configuration for the MPU chip
You could also use atan2() to
find the angle from acceleration data. The angle change is small so
sin() and tan() will give you very similar results. The following line
of code uses atan2(ay,az) because the sensor was placed in paralle with
the car. You can use atan2() or asin().
double accelYAngle = atan2(ay, az); // atan2() return a radian within -pi and pi. double degAccelAngle = accelYAngle*57.29578; //multiply it by 180/pi (or 360/2pi), which is 57.29578 to convert it to degrees from radian
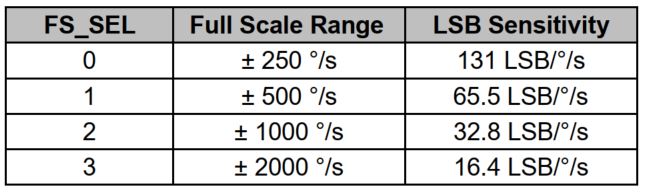
For Gyro's readout data is
angular velocity (degree/s), for example the loop time
is 4000 us, so the Gyro raw data should be converted in degrees using
the following formula:
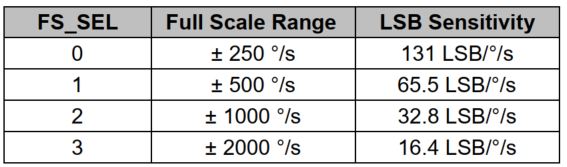
Gyro Raw Data (delta angle change in LSB) x 0.004 s /(131
LSB/degree/s) = Gyro Raw Data x 0.00031. The following example uses a different loop time so gz was mutiplied by 0.00000075:
double scaledZGyro = ((gz*0.00000075)*57.29578);
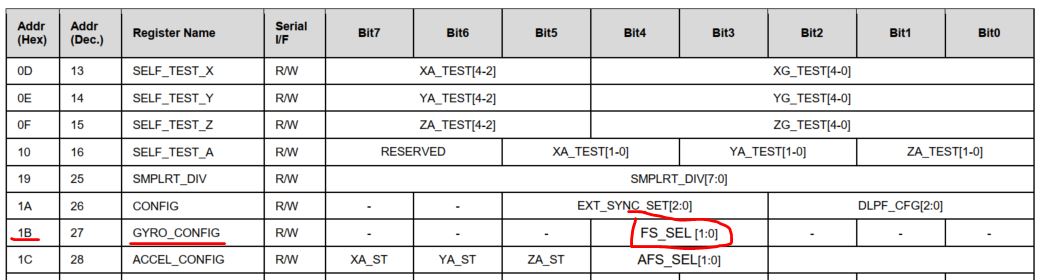
The address for the FS_SEL bits:
Now, the Data Fusion is a
very common technique to filter out the
high-frequency components and keep the low frequency components.
The angle_gyro variable
should store the real angle it has travelled.
We have two measurements of
the angle from two different sources. The measurement from accelerometer
gets affected by sudden horizontal movements and the measurement from
gyroscope gradually drifts away from actual value. In other words, the
accelerometer reading gets affected by short duration signals and the
gyroscope reading by long duration signals. These readings are, in a
way, complementary to each other. Combine them both using a Complementary Filter
and we get a stable, accurate measurement of the angle. The
complementary filter is essentially a high pass filter acting on the
gyroscope and a low pass filter acting on the accelerometer to filter out
the drift and noise from the measurement.
1. Use an Arduino UNO board
to communicate with an MPU6050 sensor module. Be able to read
Acceleration and Gyroscope data in the serial monitor.(10 pionts) 2. Be able to use data fusion and the complementary filter to report the angle of the MPU module. (10 points) 3. Refer to Sections 2.3 and
2.4, develop your own PID controller for the Tumbller robot and be able
to balance and remotely control it. (20 points) 4. Build a balancing robot
using the NEMA17 stepper motor and acrylic plates available in the lab.
You can reuse the car frames built by former students. The robot is
remotely controlled by a joystick through the 2.4 GHz RF modules. (20
points). 5. Use an encoder to tune the PID parameters (20 points) 6. Design the PCB for the remote and the car. (20 points)